tinkrmind
Robotics & Motors
Microchip
Programmable-Air
A portable hardware kit for experimenting with pneumatics

Funding ended on Jun 27, 2019 at 04:59 PM PDT.
tinkrmind
Robotics & Motors
Microchip
Funding ended on Jun 27, 2019 at 04:59 PM PDT.
Programmable-Air is a hardware toolkit that allows you to inflate and deflate objects. It has everything you need to start playing with pneumatics and inflatables including high pressure and vacuum pumps, valves, and a pressure sensor on board. Pneumatics opens up a world of possibilities for a maker to explore:
This birthday cake erupts glitter with a puff of air when you cut into it. So named for the 3000 milliseconds of delay between you cutting the cake(which is recognised by capacitive touch) and the glitter bomb setting off. Let there be edible pneumatics!
FLXO is a thinking tool for soft-robotics exploration. It’s a
kit consisting of modular interlocking pneumatic muscles which easily integrate with other robotics kits on the market. At present it’s designed to integrate with the VeX robotics platform.
Inspired by a similar gripper from MIT CSAIL, Aditya and I made a simpler version of a gripper with amazing gipping force.
Julia Rich used Programmable-Air to power a silicone-casted heart. The heart beats faster the closer you get to it. It is a part of her larger artistic project The Mechanics of Being Human.
In Foxy Lovelace - Kim made a cyborg Femme fatale who blows a bubble out of her artificial lips.
This crawling critter is a three compartment silicone soft robot. I made it as an homage to how the project started, based on a crawling robot. A detailed tutorial on this is forthcoming.
I assembled most of the Programmable-Air PCBs using other Programmable-Air boards with this vacuum pickup! The Deluxe Kit will have everything you need to make this.
The pressure sensor allows you to detect sudden spikes in pressure caused by say someone pressing on a soft robot connected to the board. Here Mr. Piggy is controlling the lights using this. But the cool part is that this is a ridiculously scalable sensor. Imagine a long tube connected to the board and say wrapped around a bumper car…
A balloon filled with coffee grounds on a 3D-printed holder. Generally the coffee grounds are free to move around. When you pull a vacuum inside the balloon the coffee particles jam together and practically become a solid. This allows you to lift irregularly shaped objects much better than a traditional ‘hard’ gripper.
Open Soft Machines make amazingly detailed recipes to make soft robot actuators. Some of them can be controlled by Programmable-Air.
Pneumatics is kinda weird because you can get a ridiculous mechanical advantage out of it. For example, if you fill a 6" x 6" pouch with air at 0.5 bar(~7 PSI) you can lift more than 100 Kg (250 lb) of weight! So, you can easily lift a person with Programmable-Air.
Eldy used Programmable-Air to power her amazing inflatable pushup bra at TEI 2019. The bra automatically customizes its shape to support users with asymmetrical breasts.

In Popcorn Bucket, Gilad uses Programmable-Air to make a fast linear actuator using a syringe.

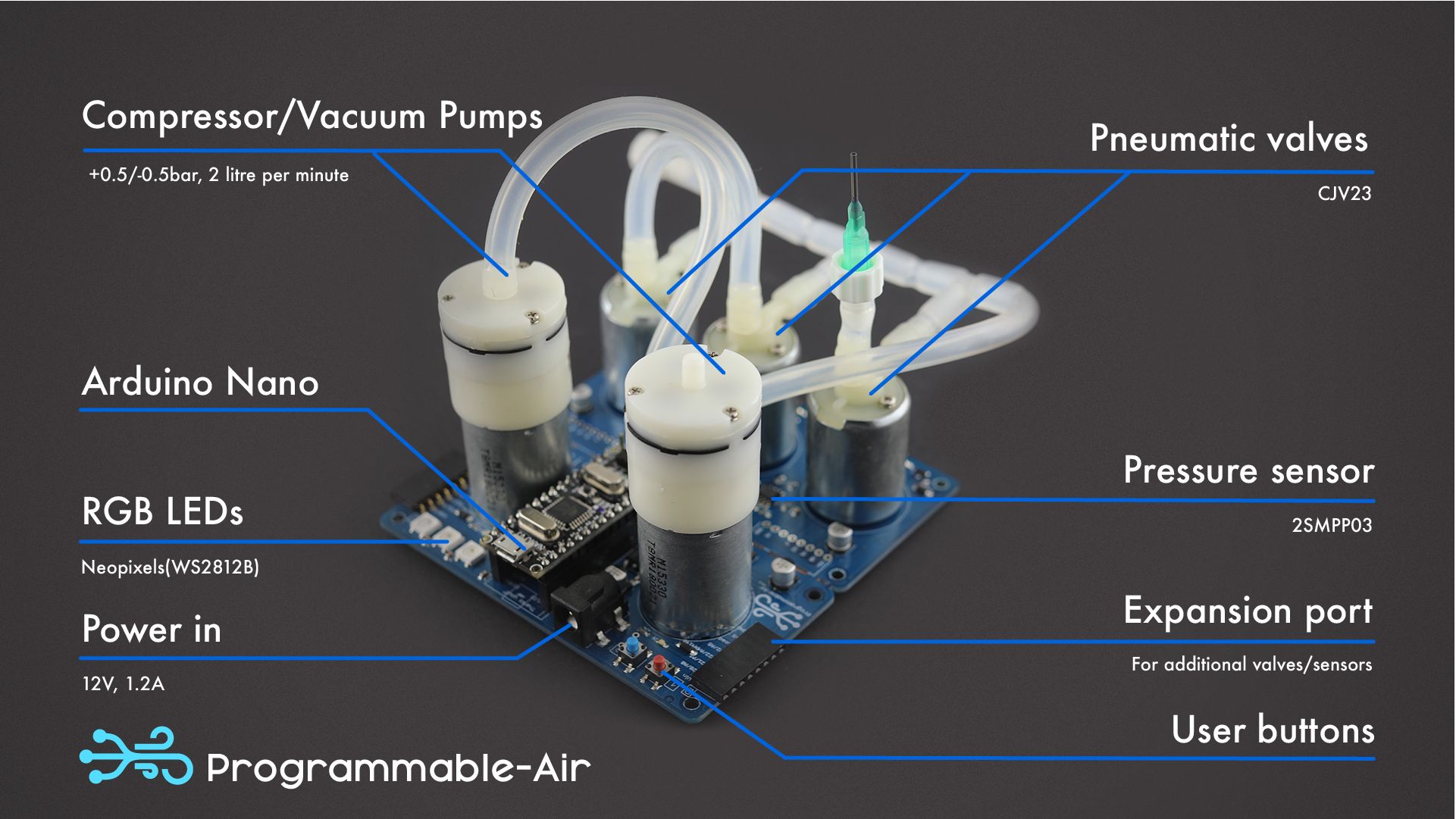
Programmable-Air is packed with:
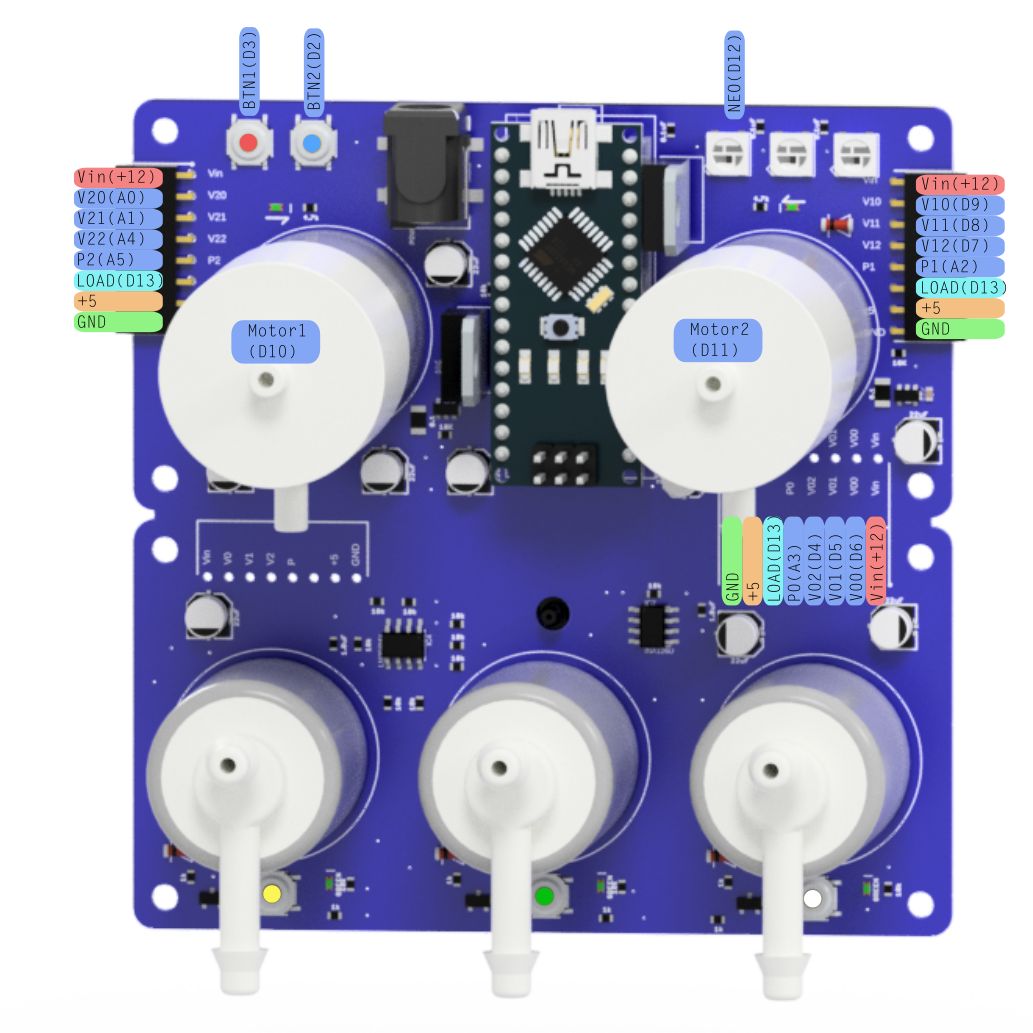
It’s all controllable via an onboard Arduino Nano.
The output from Programmable-Air is a single tube that goes into your soft robot or pneumatic actuator. By controlling the motors and valves, you can push air in or out of the actuator, or let it exchange air with the atmosphere. All while you get feedback about the state of the actuator through the pressure sensor.
The Programmable-Air library makes it easy to control the valves and pumps. Simple functions like blow(), suck(), vent(), and readPressure() cover most of the basic use cases. There is detailed documentation on the project GitHub.
| Programmable-Air | Pneuduino | Soft Robotics Toolkit | |
|---|---|---|---|
| Makers | tinkrmind - NYU | Jifie Ou - MIT | - |
| Availability | Now | Private beta only | Self-assembled |
| Cost | $175 for everything | $~400 for similar capabilities | $1000 for everything |
| Ease of use | Easy | Medium | Hard |
| Portability | High | Low | Low |
| Pressure range | Medium | High | High |
| Flow rate | Medium | High | High |
Programmable-Air was built as an educational tool. You can find getting started instructions for the project at the project website and the project GitHub. The project website has some detailed guides and tutorials on making soft robots, with more to come. The more support this campaign gets, the more time I can spend documenting and adding tutorials.
Get going with Programmable-Air! Featuring:
All you need to kick-off is an Arduino Nano, power supply (12 V, 1.5 A barrel jack), and a USB cord.

Get started with inflatable robotics right away. The Deluxe Kit comes with:
Programmable-Air started when I saw this video of a crawling soft robot from Harvard, made back in 2011:
I wanted to make a similar robot. After little searching, I realized that it’s very easy to make such a robot. You just 3D print and cast a mold in silicone. There are free and open source tools available to design, model, and test such robots. But the tools available to control the soft robots are too expensive, and difficult to use and modify. After thinking about it a little, I was surprised how actuation through air control (that is pneumatics) is practically absent from the maker toolbelt. So I decided to make a tool for hobbyists and makers to control inflatable soft robots. I wanted it to be cost effective, portable, easy to setup and modify, and easy to use.
I tested a bunch of pumps, valves, and pressure sensors and found electro-pneumatics to be much more challenging than electronics. This is mainly because with electro-pneumatics, you also have to ensure that the components are pneumatically compatible (i.e. support the same pressure range, flow rate, and nozzle size) on top of being electrically compatible. The fact that most cheap components have minimal, if any, datasheets doesn’t help much either. You wouldn’t believe how many pumps, valves, and pressure sensors I had to try to find ones that have the same nozzle size!
I finally settled on a pump used traditionally in electronic blood pressure monitors and for boosting oxygen pressure at patient beds in hospitals. The electronic valves are traditionally used in Keurig machines. I opted to use an analog pressure sensor rather than a digital one because I could bring the BOM cost down by ~$20 just by designing my own amplifier for it.
I hope you will enjoy using it as much as I enjoyed designing it.
All Programmable-Air units will be delivered to Crowd Supply’s warehouse for final distribution to backers worldwide. For more information, please see this page about ordering, paying, and shipping.
A physicist turned engineer, maker, and artist. Amitabh enjoys solving inter-disciplinary problems in electronics, mechanics, and human-computer interaction. He’s currently pursuing his master’s at ITP, NYU.

Programmable-Air boards will be manufactured by Worthington Assembly Inc. based out of Worthington, MA. Component manufacturers will ship directly to Worthington Assembly. All components have multiple sources to reduce risk of long manufacturing lead time.
Programmable-Air has been under development for over a year and I’ve gone through six versions of the board and over fifty beta testers have used the board.
Electromechanical devices (pumps and valves) mounted in a non-traditional manner can sometimes suffer unexpected mechanical failure modes after long use. On Programmable-Air, these components are mounted to the board with automotive-grade silicone to prevent such issues, and boards with this mounting method have worked for months without issues.
When producing hundreds of boards, there are always risks due to component availability and shipping. The expected shipping dates have been padded to accommodate such issues. And should any issues arise during manufacturing, we’ll keep backers apprised through project updates.
Programmable-Air is part of Microchip Get Launched
"[Programmable-Air] enabl[es] you to program your very own pneumatic system,"
"The kit is ready to go right out of the box, so you don’t need to purchase additional power supplies, cables, pumps, tubes, or valves."
"I have big plans for this already... do you know about wacky waving inflatable arm flailing tube men?"
"Soft robotics is an exciting field. Mastering the pneumatic control of pliable materials has enormous potential, from the handling of delicate objects to creating movement with no moving parts."
"Programmable-Air pneumatics kit puts everything you need for simple air power experimentation into one package."
Produced by tinkrmind in Brooklyn, NY.
Sold and shipped by Crowd Supply.

Show your support by buying us a cup of mint tea!
Want to buy this item? Check the current project page for the latest information.

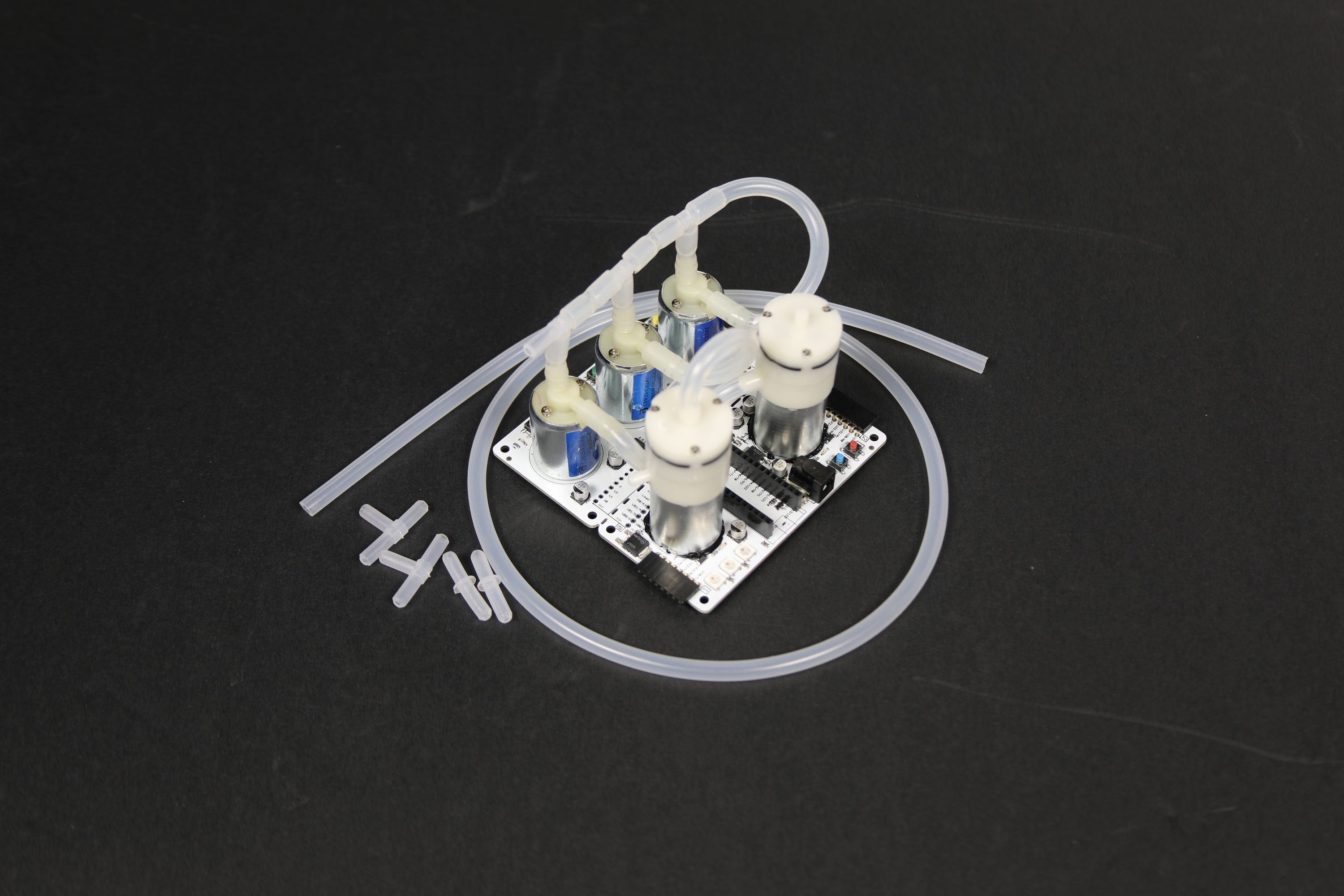
Your very own Programmable-Air board with extra silicone tubing and pneumatic connectors. Just add an Arduino Nano, power supply, and USB cord to get started.
Want to buy this item? Check the current project page for the latest information.

Make your soft robot! Comes with a Programmable-Air board with an Arduino-compatible Nano, power supply, micro USB cord, extra silicone tubing and pneumatic connectors, materials to make handheld vacuum pickup and to make jamming grippers. All packed in a beautiful foam case.
Want to buy this item? Check the current project page for the latest information.
Brooklyn, NY
Physicist, turned maker, artist, and engineer. Amitabh enjoys solving inter-disciplinary problems in electronics, mechanics and human-computer interaction. Currently pursuing master's at ITP, NYU where he seeks to learn everything it takes to turn a napkin sketch into a product.

