Project update 6 of 11
IQ’s Vertiq 6806 is now the Vertiq 8108
by Jon BIQ Motion Control recently launched its newest motor module, the Vertiq 6806, which is an integrated motor and controller for robotics and drone applications. With IQ’s unique hardware design and proprietary software, the motor was built to maximize torque output, efficiency and precision while minimizing motor cost, vibration and footprint. In order to guarantee these features we tested with the alpha prototype of the Vertiq 6806 heavily to determine its performance capabilities and limitations. After this evaluation, IQ has decided to update the design from a 6806 motor to an 8108 motor, meaning the stator is 81 mm in diameter (up from 68mm) and has a stack height of 8 mm (up from 6 mm).
One of our primary intents for the initial design of the 6806 was keeping the pole count low. The resolution of magnetic rotary encoders is divided by the number of pole pairs and if an error in position sensing occurs, that error is multiplied by the number of pole pairs. So from a resolution and error-minimization perspective, keeping the number of pole pairs low is beneficial. The Vertiq 6806 was designed with 7 pole pairs and 12 stator teeth, which means that for every one mechanical rotation, the motor has to make seven electrical rotations. By our standards, 7 pole pairs is quite low and under most circumstances, the motor performed well. Unfortunately, there were unintended consequences with this design.
During testing of the alpha prototype on a BFD drone, we noticed that as we pushed the motors into higher torque ranges, the motor was overheating. We realized the thermal issues and inability to produce high torque were a result of iron saturation in the stator teeth. Saturation is the state in which an increase in applied external magnetic field cannot increase the magnetization of the material further, so the total magnetic flux density more or less levels off. In other words, when we would push the motor (with a 28-inch propeller attached) to high speeds and torques, a metaphorical traffic jam in the magnetic field would occur. Once the iron starts to saturate it cannot move the magnetic field, which then causes the motor to heat up and not produce additional torque. This is a major problem for heavy-lift drones, which require high torques and speeds to spin large propellers.
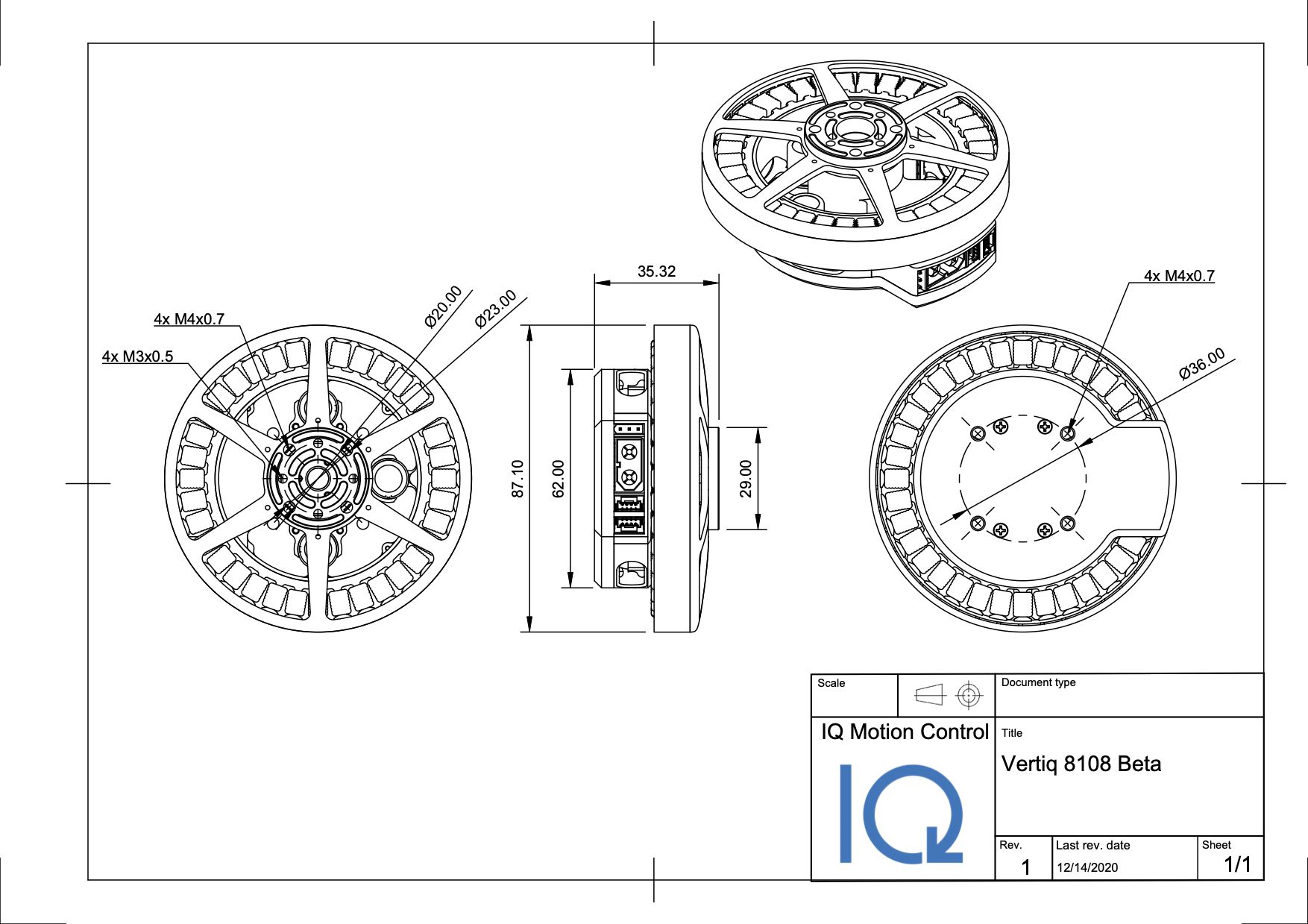
In order to solve this issue, IQ could have added more iron to the motor so it can hold more magnetic field, but doing this would also increase the weight of the motor. One of the reasons why high power motors are physically large is because they need to conduct a large amount of magnetic flux for high power. However, when it comes to aircraft the weight of the magnetic core must be kept to a minimum. Therefore, we decided to modify the design to have 36 stator teeth and 21 pole pairs. By increasing the number of stator teeth, the magnetic field is smaller in each tooth and has a shorter distance to travel, which means the motor is less susceptible to iron saturation. IQ is confident that this motor design will be able to produce the desired torques and despite the larger stator size, we expect the weight of the motor to decrease because it’ll use less iron.
This brings us back to our initial concern about the number of pole pairs affecting the encoder resolution. While increasing the number of pole pairs does increase the amount of potential error, we have determined that this will not impact motor performance in a significant way. We conducted a variety of tests using the T-Motor U8 Lite (a 21 pole pair motor) with our controller and a retrofitted magnet for position sensing. The results of the tests were encouraging, especially once we implemented our calibration algorithms.
The Vertiq 8108 will have encoder linearization and anticogging, which will help to minimize errors. With these features, the decreased weight and higher torque, the 8108 will prove to be the ideal actuator for high speed and high torque applications.
To learn more about pole pairs check out this website: https://www.jmag-international.com/engineers_diary/019/