Project update 38 of 38
StereoPi-powered drones and... the StereoPi v2!
by Eugene PomazovStereoPi-based AI-accelerated drones
The MorphEyes project was done at the University of Maryland College Park. It has a few interesting features:
The baseline (stereo base) is dynamically adjusted on the go, according to the distance to closest obstacles and other parameters.
The team is planning to use Intel Movidus for advanced AI techniques.
In the related Arxiv.org (PDF) the team showcases three different applications of this system for quadrotor navigation:
- flying through a forest
- flying through an unknown shaped/location static/dynamic gap
- accurate 3D pose detection of an independently moving object
They show that their variable baseline system is accurate and robust in all three scenarios.
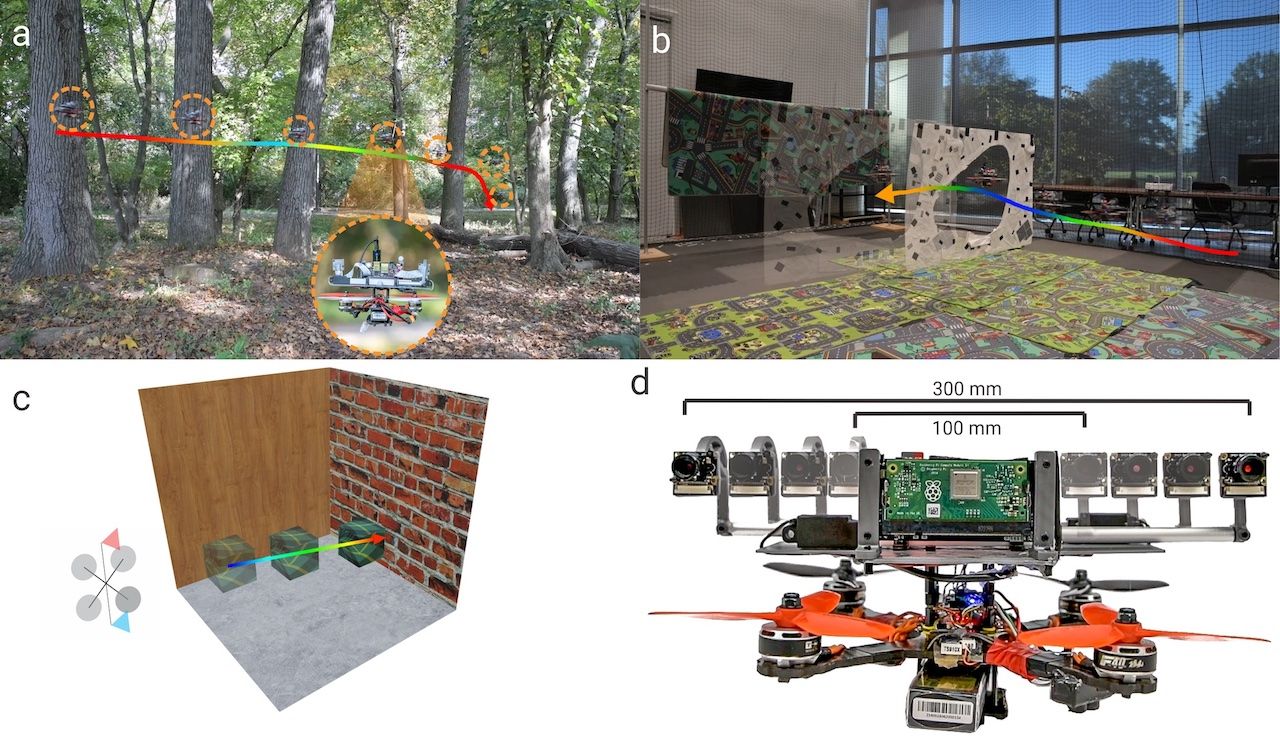
(a) Flying through a forest, (b) Flying through an unknown shape and location dynamic gap, (c) Detecting an Independently Moving Object. (d) Variation of baseline from 100 mm to 300 mm. Notice that the stereo system is bigger than the quadrotor at the largest baseline. (Image source)
StereoPi V2 is about to launch!

Keep an eye on the StereoPi V2 page here on CrowdSupply in the next few weeks, as we are quite close to launching! You can, of course, sign up to receive updates to get the latest news.