G-Fusion
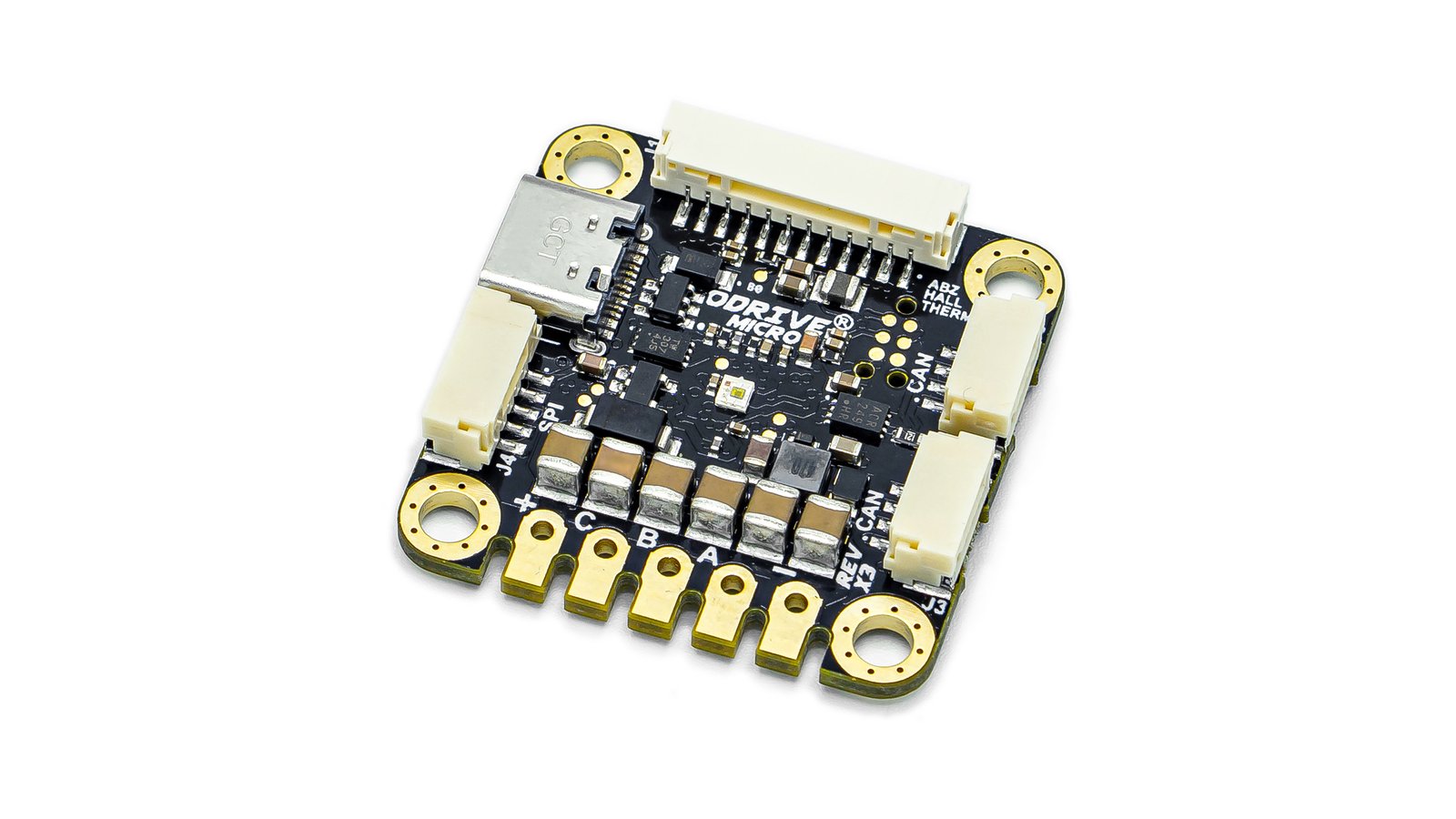
Robotics & Motors
GNSS
Pellicanus
An open source INS/GNSS-navigation development board
This project is launching soon.
0
updates
updates
G-Fusion
Robotics & Motors
GNSS
This project is launching soon.
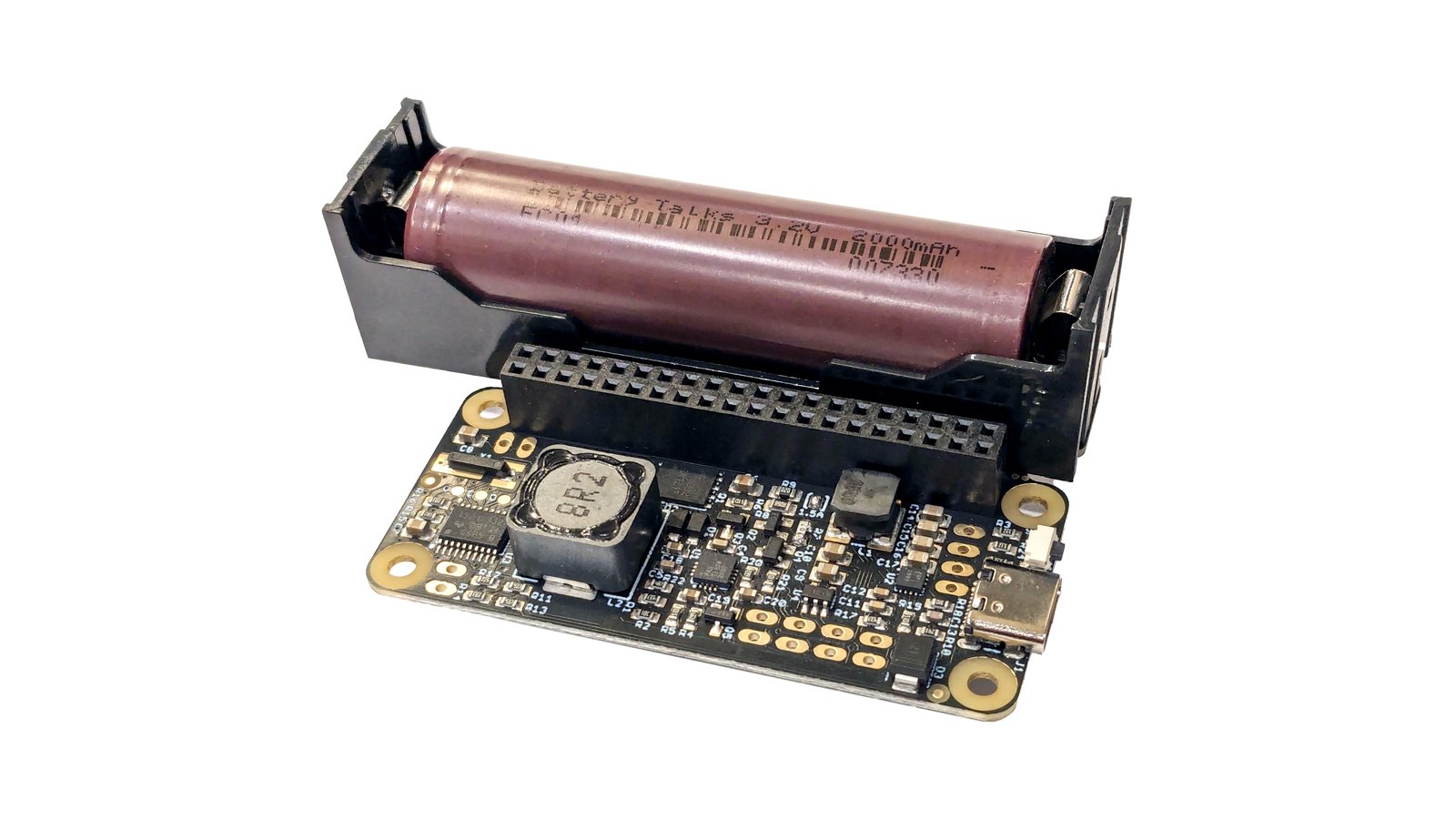
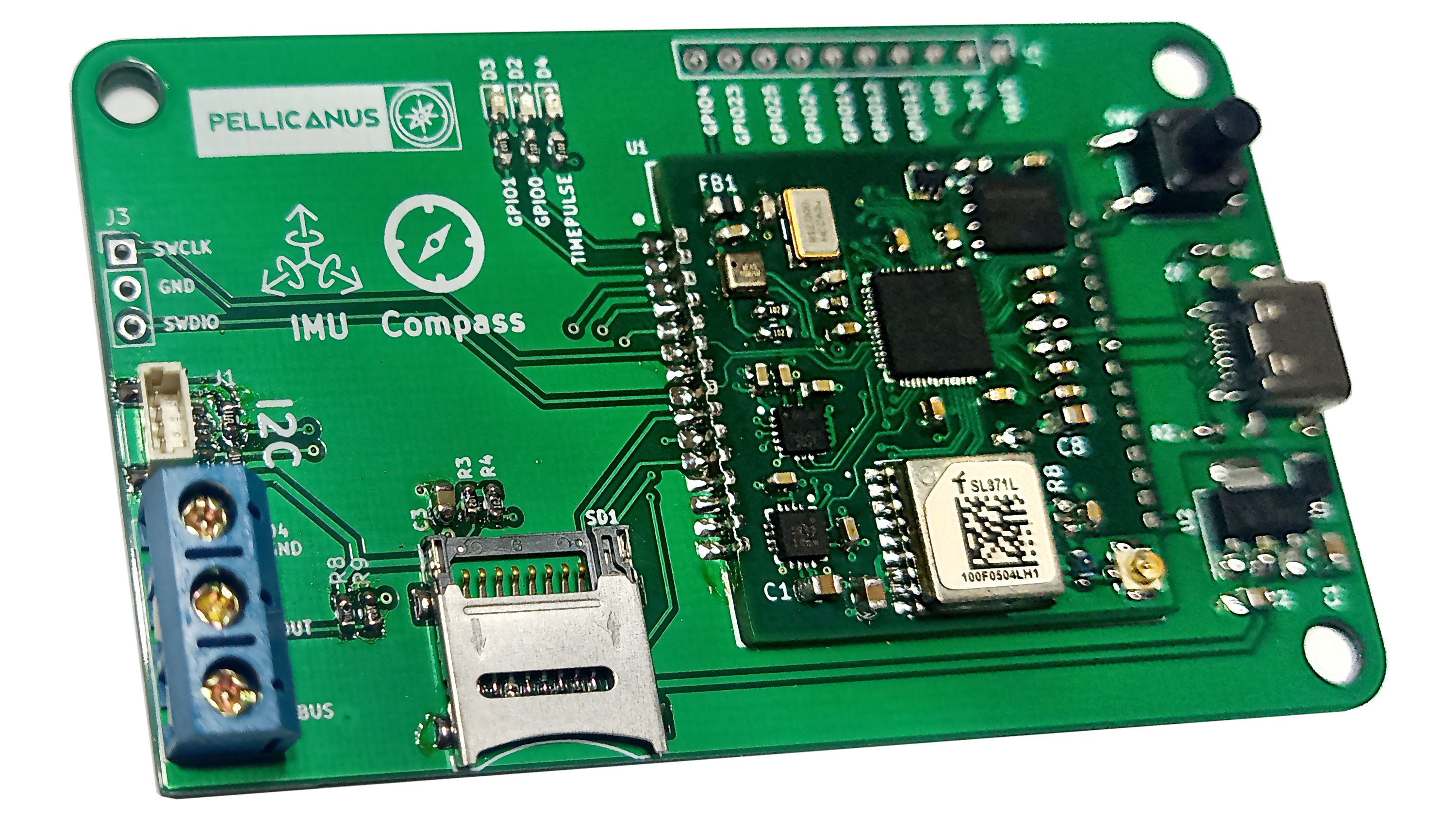
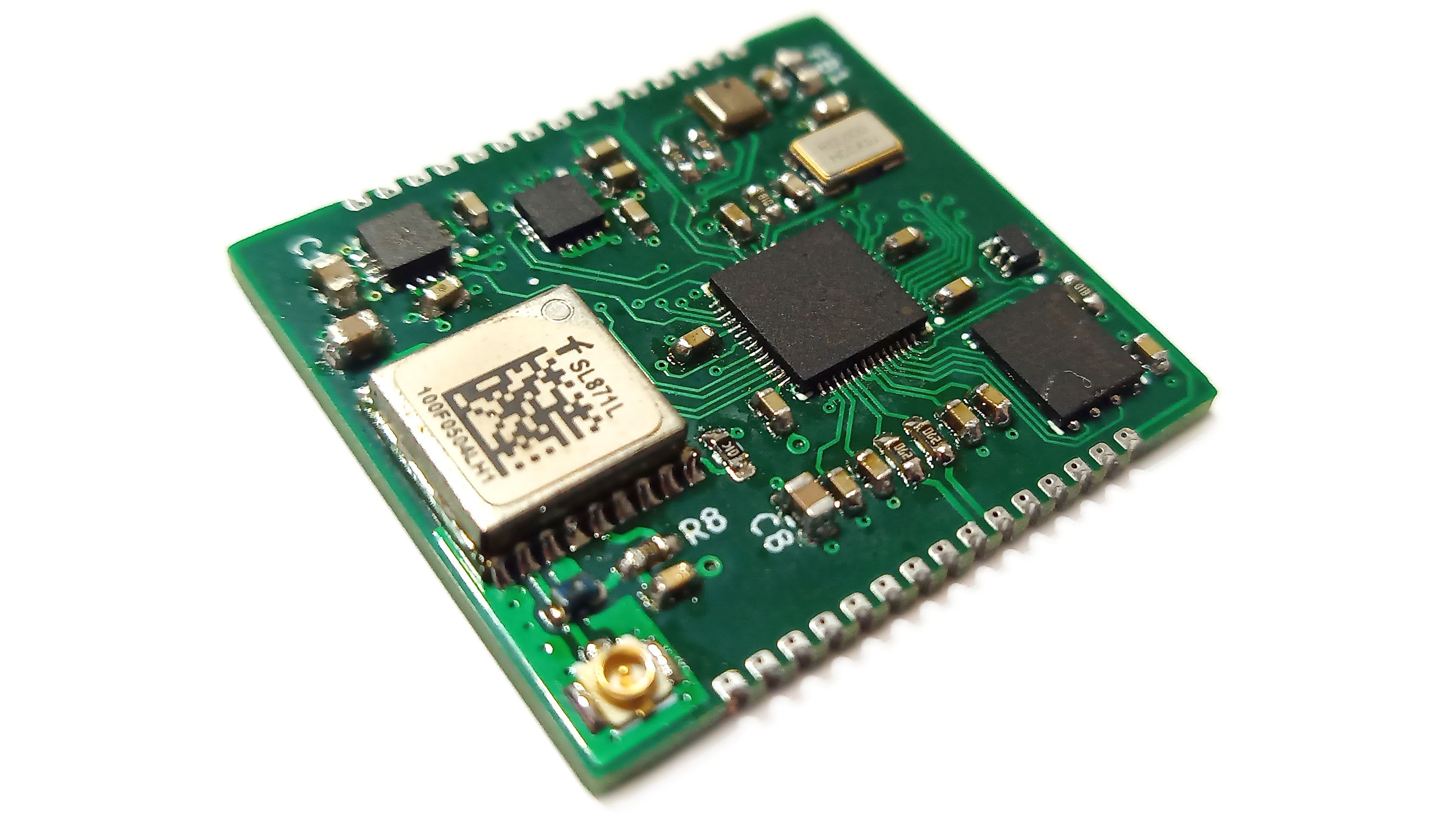
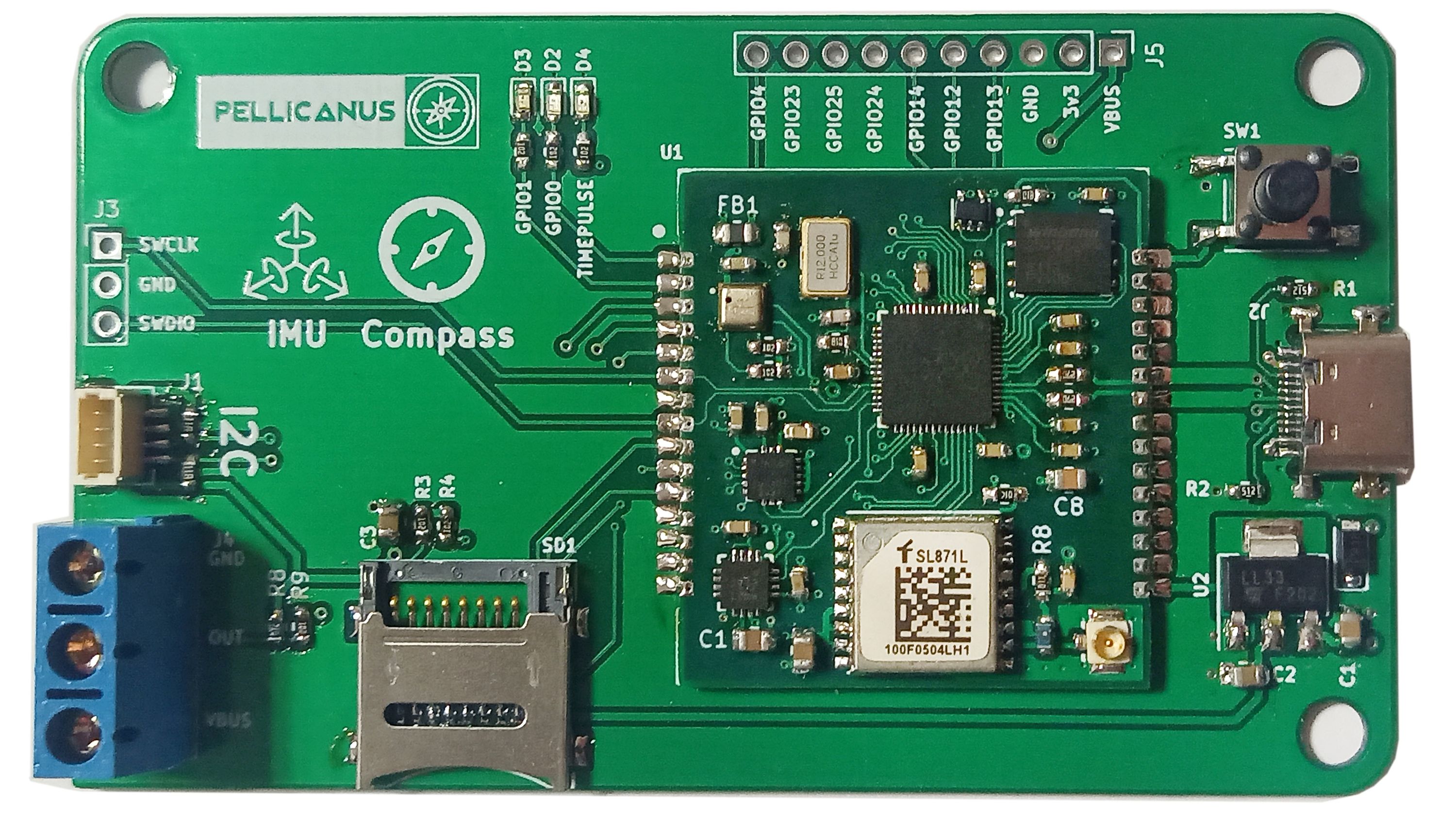
Pellicanus is an open-source, RP2040-based INS/GNSS module that you can program in MicroPython, C, or Rust. It allows you to add Vertical Reference Unit (VRU), Attitude and Heading Reference System (AHRS), and INS/GNSS functionality to all kinds of platforms: automobiles, drones, autonomous vehicles, and just about anything else you need to keep track of. We’ve designed Pellicanus as a 33x30 mm castellated module, which makes it easy to integrate into your projects. We also provide a carrier board with various interfaces so you can evaluate the module and get start developing for it right away.
Pellicanus is open hardware driven by open-source software. We will published both the KiCAD design files for the board and the loosely coupled extended Kalman filter (EKF) that comes pre-loaded on it. You can modify our algorithm to suit your needs or replace it with your own!
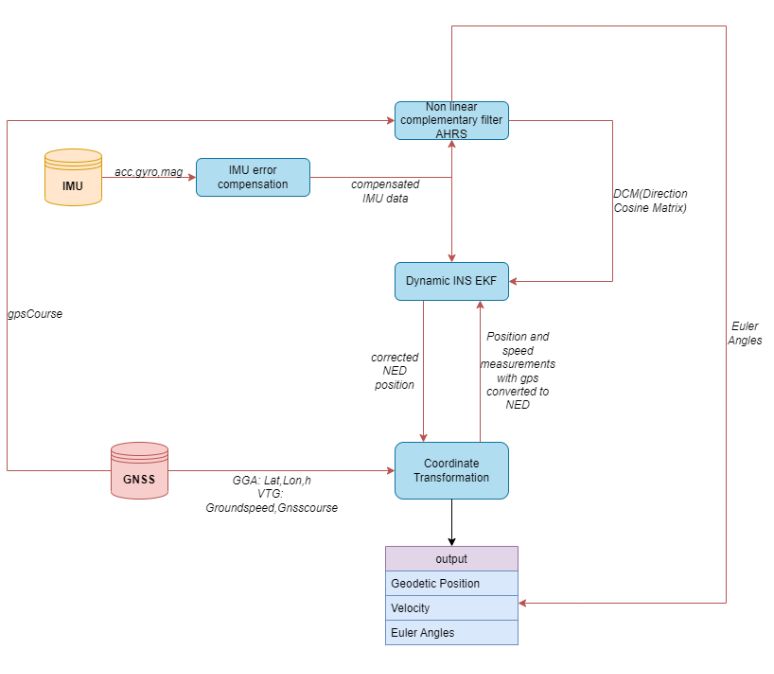
By default, Pellicanus includes a navigation algorithm with a discrete architecture. It includes a nonlinear complementary filter (NCF) for AHRS and a loosely coupled extended Kalman filter (EKF) for navigation. We are working on other algorithms as well, and we intend to publish them when they are ready.
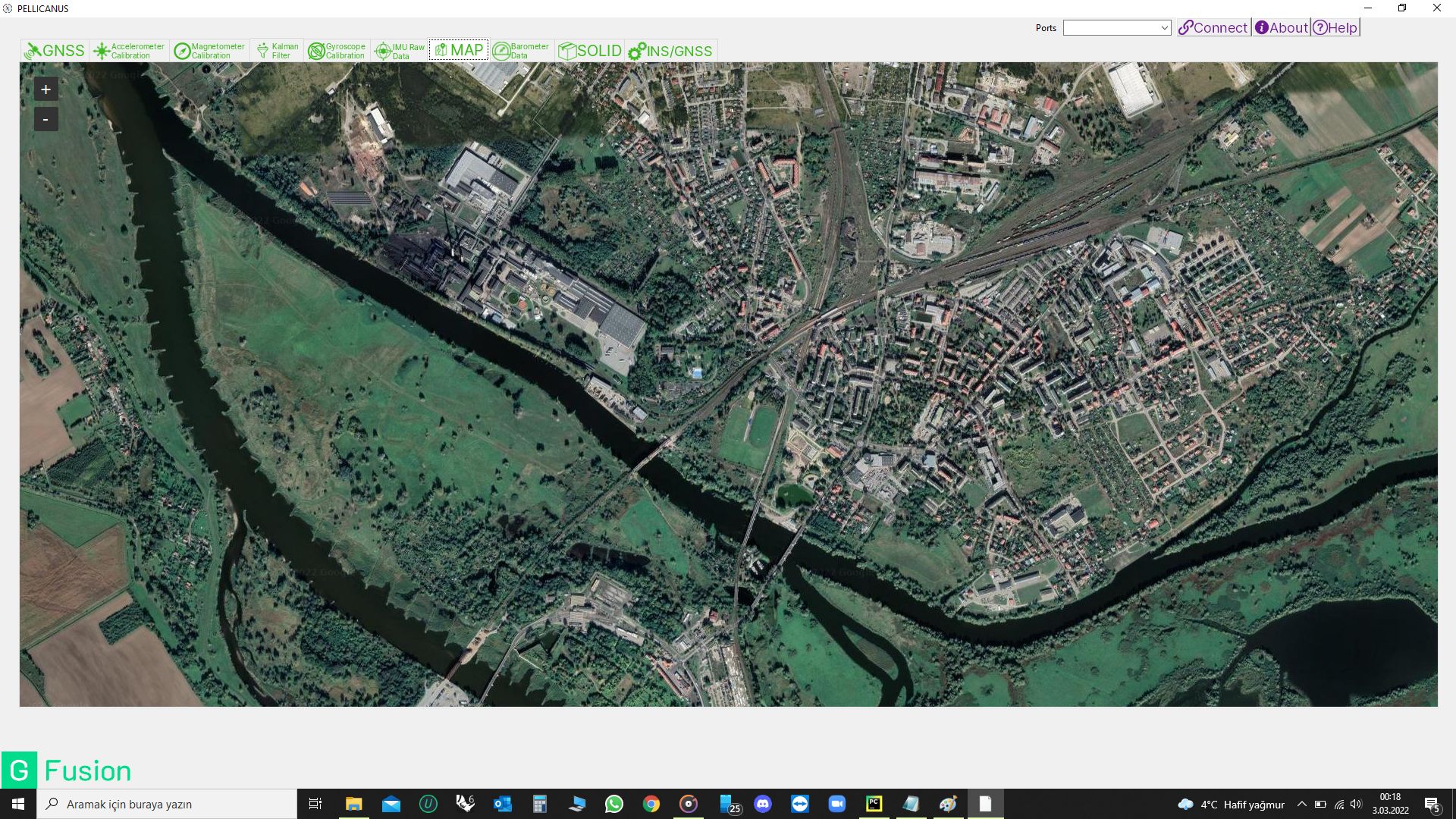
We have also developed a GUI to demonstrate how our algorithms work and to help you with calibration.
Pellicanus is a high-precision INS/GNSS with completely open source mathematical models, software, and schematics. We also provide documentation that makes it easy to learn how to incorporate Pellicanus into your project.
You can sign up right at the top of this page to be notified when this campaign launches and to receive any other useful updates. We work hard to send out useful information only, and you can unsubscribe at any time.
"If you are searching for an easy way to add GPS navigation to your next project you may be interested in [this] new open source INS GPS integrated navigation system"
"With a positioning accuracy of ±4 meters, the Pellicanus Navigation Application Board adapts to the needs of the application. [trans.]"