Project update 6 of 7
Testing Hyfix Rover's Accuracy with PPK
by Hyfix TeamIn this update, we will focus on a PPK test for the Hyfix Rover. PPK, or Post-Processing Kinematics, is a technique that enhances the accuracy of GPS data. Instead of using NTRIP as we did in the previous tests, PPK does the work after the data is collected. It takes the GPS data and pairs it with correction details from a reference station. This fixes any errors that may have affected the accuracy of the gathered GPS data.
The PPK Test
To conduct the PPK test with the Hyfix Rover, the same high-quality antenna was used as in our previous tests. This test was around 20 minutes long and was conducted in an open area, providing a clear and unobstructed view of the sky to maximize satellite signal reception. In addition, RTCM messages were activated, which ensured precise data collection during the test.
The post-processing stage involved using a GEODNET station that was located in close proximity to the test site. The reference stations provided correction details that were applied to the GPS data collected by the Rover. By pairing the collected data with the correction information, PPK eliminated any discrepancies that could have influenced the accuracy of the GPS data.
How PPK was Applied to the Data
To collect data with the Hyfix Rover, we established a connection between the Rover and a Raspberry Pi. Accessing the Pi over SSH, we used str2str to retrieve and log raw RTCM data coming from the Rover. After these steps, we acquired data from a nearby Geodnet station. To compare both datasets, we utilized the rnx2rtkp utility. This resulted in the generation of an NMEA file, containing the refined and improved data from the application of PPK.
PPK Test Results
Below is a screenshot from another RTKLIB utility called RTKPlot. RTKPlot is a tool that visualizes GPS data on a map. It displays paths of movement, satellite locations, and accuracy information. This helps us understand the quality of GPS data and how the data is positioned.
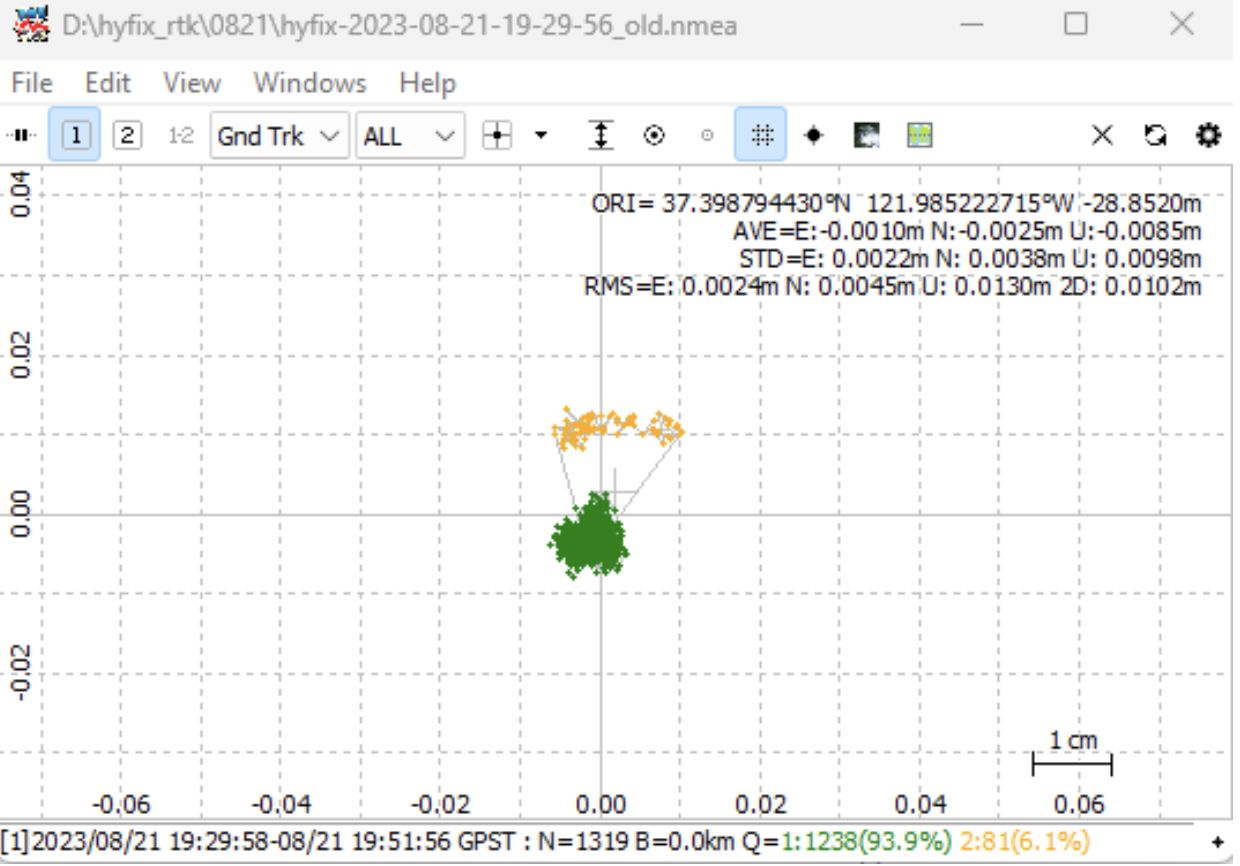
The provided data represents the outcome of the RTK positioning process. Out of the 1319 data points, 1238 achieved a RTK fix, resulting in a high success rate of 93.86%. In conclusion, our analysis of the provided dataset, with 1319 points collected with RTK positioning, demonstrates the successful application of Precise Point Positioning. By using raw RTCM data, we used the PPK to obtain a high fix rate of 93.96% with 1238 precise fix solutions out of the total 1319 points.