Project update 8 of 12
Multi-Camera Demo
by Lazar DAfter getting a few questions about using multiple Tau Cameras at the same time, we wanted to share with the whole community that it’s 100% doable. We’ve made some resources available - an example program and a 360˚ 4-camera mount - so you can make your own multi-camera setup in no time!
Multi-Camera Example Program
This example program uses the TauLidarCamera Python API and OpenCV to render depth data from all connected Tau Cameras in real-time!
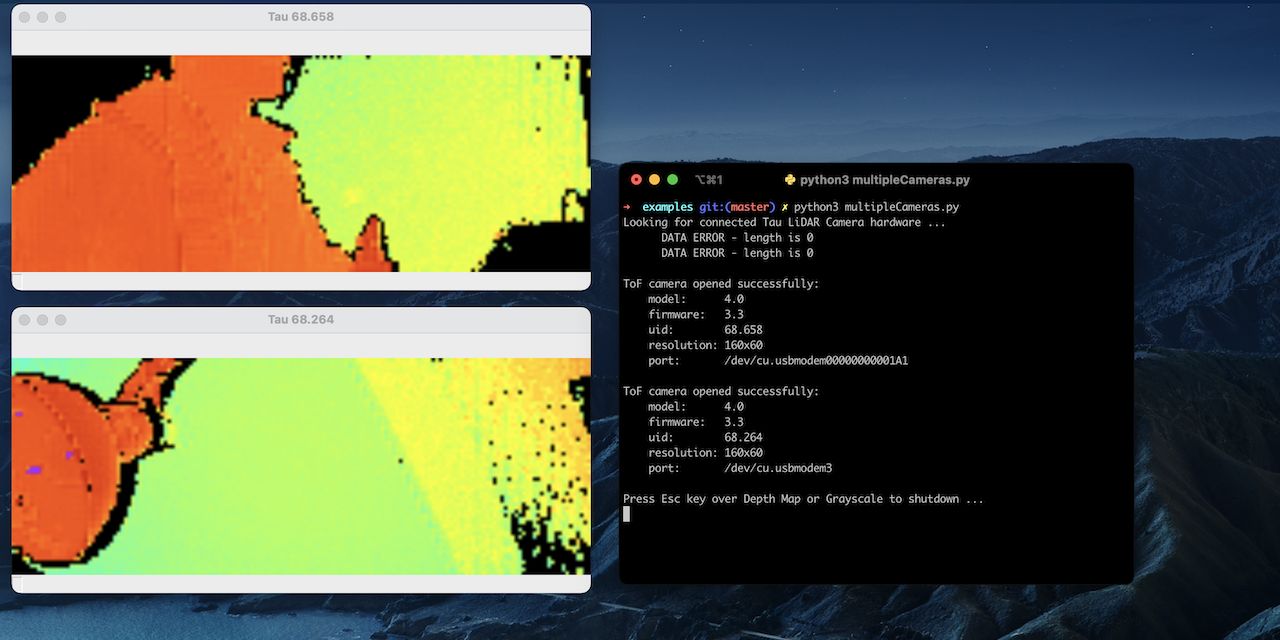
When the program is launched it will:
- Scan the USB ports for any connected Tau Cameras
- Initialize any Cameras it finds
- Render depth maps from all Cameras using OpenCV
The multiplecameras.py program can be found on GitHub (along with the rest of the Python API example programs) at: https://github.com/OnionIoT/tau-lidar-camera/tree/master/examples
3D Print a 360˚ 4-Camera Mount
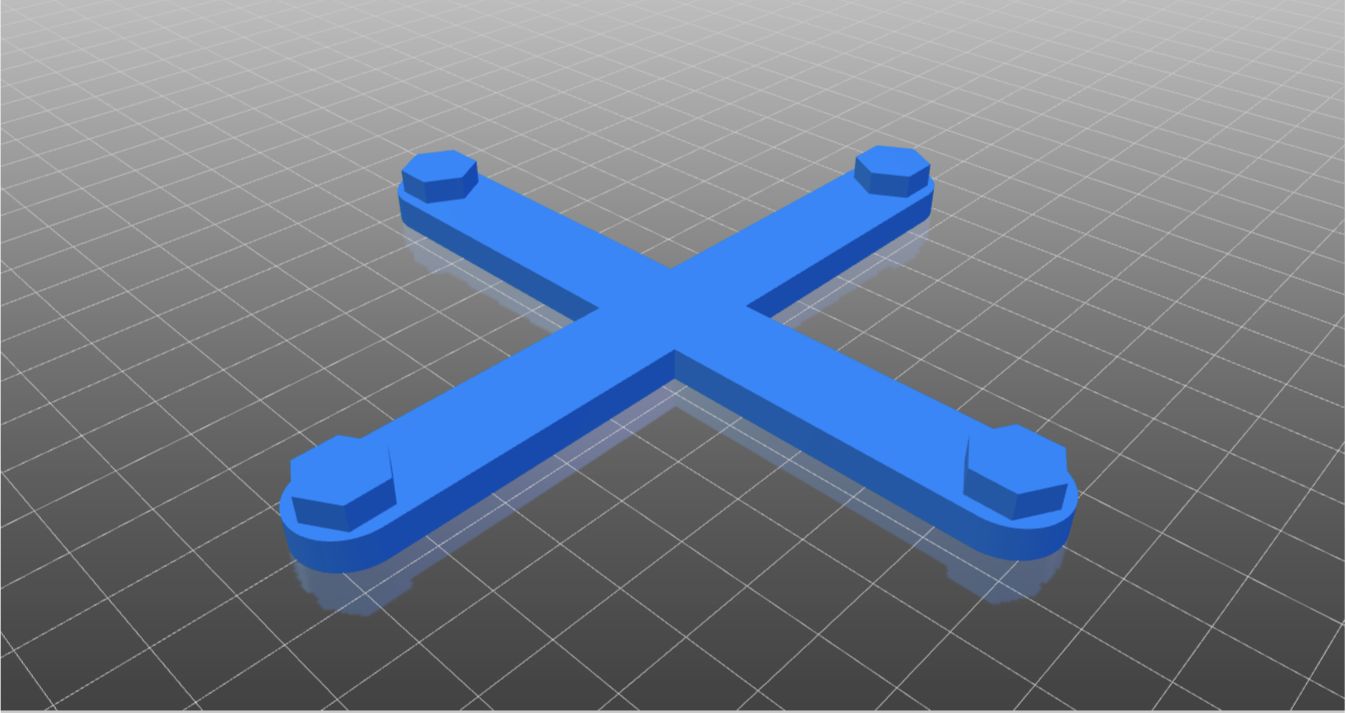
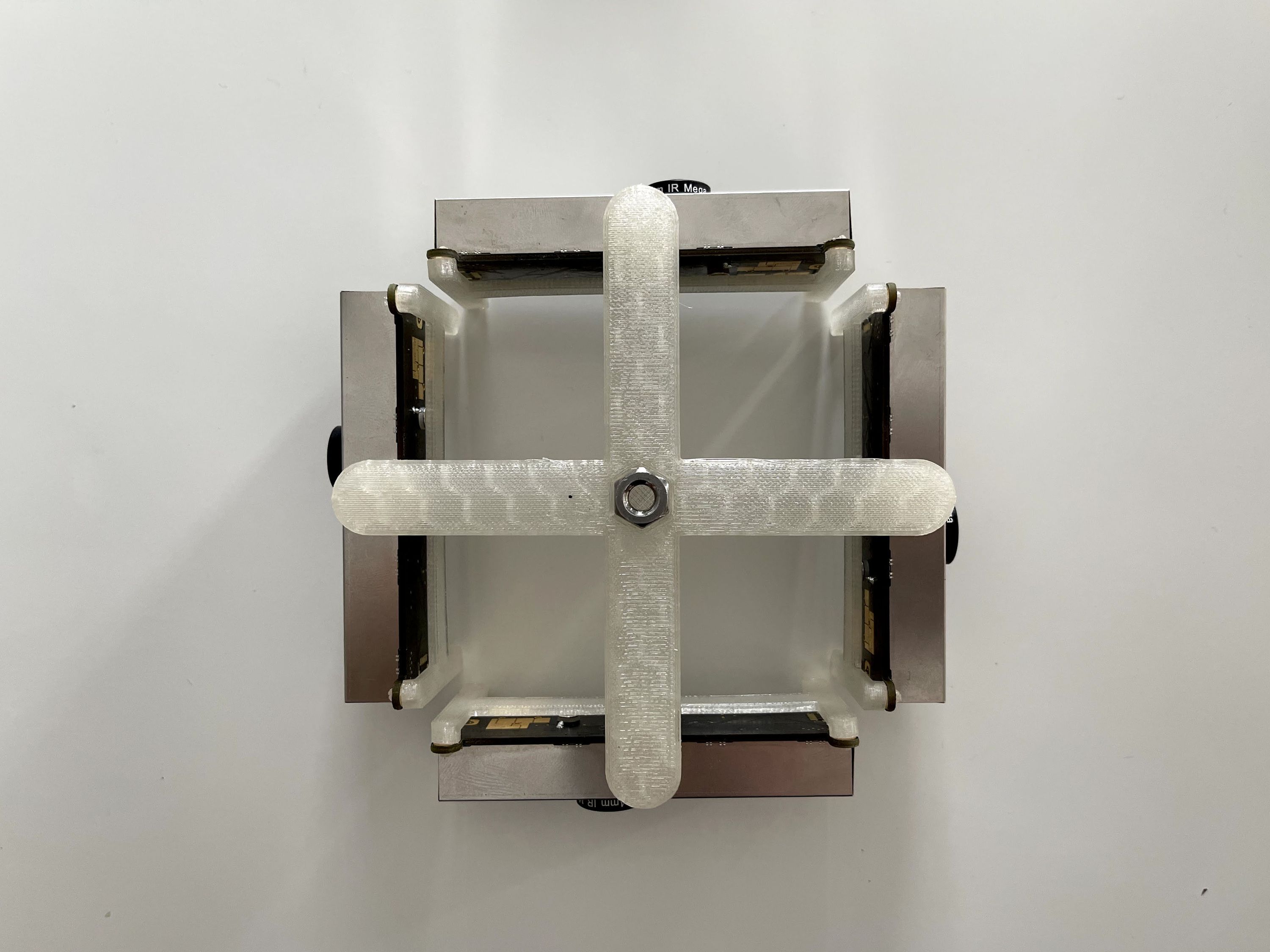
Instead of designing a multi-camera mount from scratch, we decided to make a 4-sided base compatible with the existing Tau Camera mount.
It links together four Tau Cameras on their individual mounts and can be attached to any standard tripod, giving you the ability to make a 360˚ depth map of your environment!

To 3D print your own, you’ll need:
- 4x Tau LiDAR Cameras
- Camera Mount and Base STL files from Thingiverse
- Access to a 3D printer & filament
- A 1/4-inch-20 UNC hex-shaped nut
Then you’ll need to:
- 3D print 4x Camera Mount pieces
- 3D print the Base
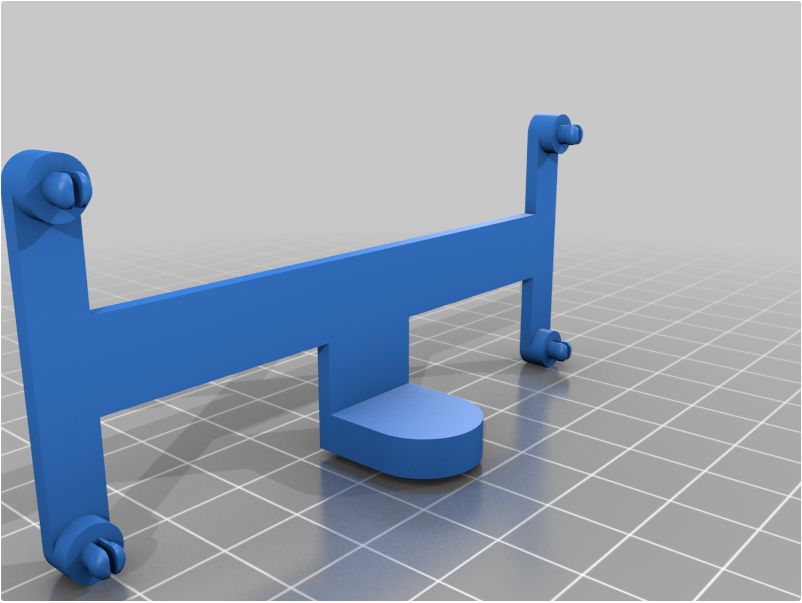
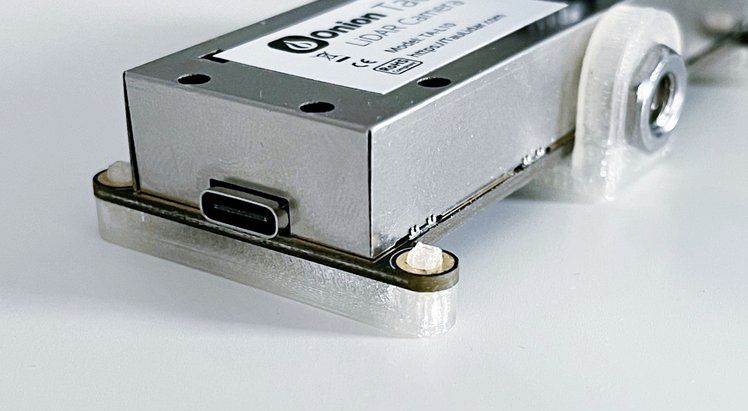
- Attach a Camera Mount to each of the Tau Cameras - pop the mount's pegs into the Tau's four mounting holes
- You'll notice the base has hex-shaped pegs at the end of each "arm". Connect each of the Tau Camera mounts to the base using these pegs.
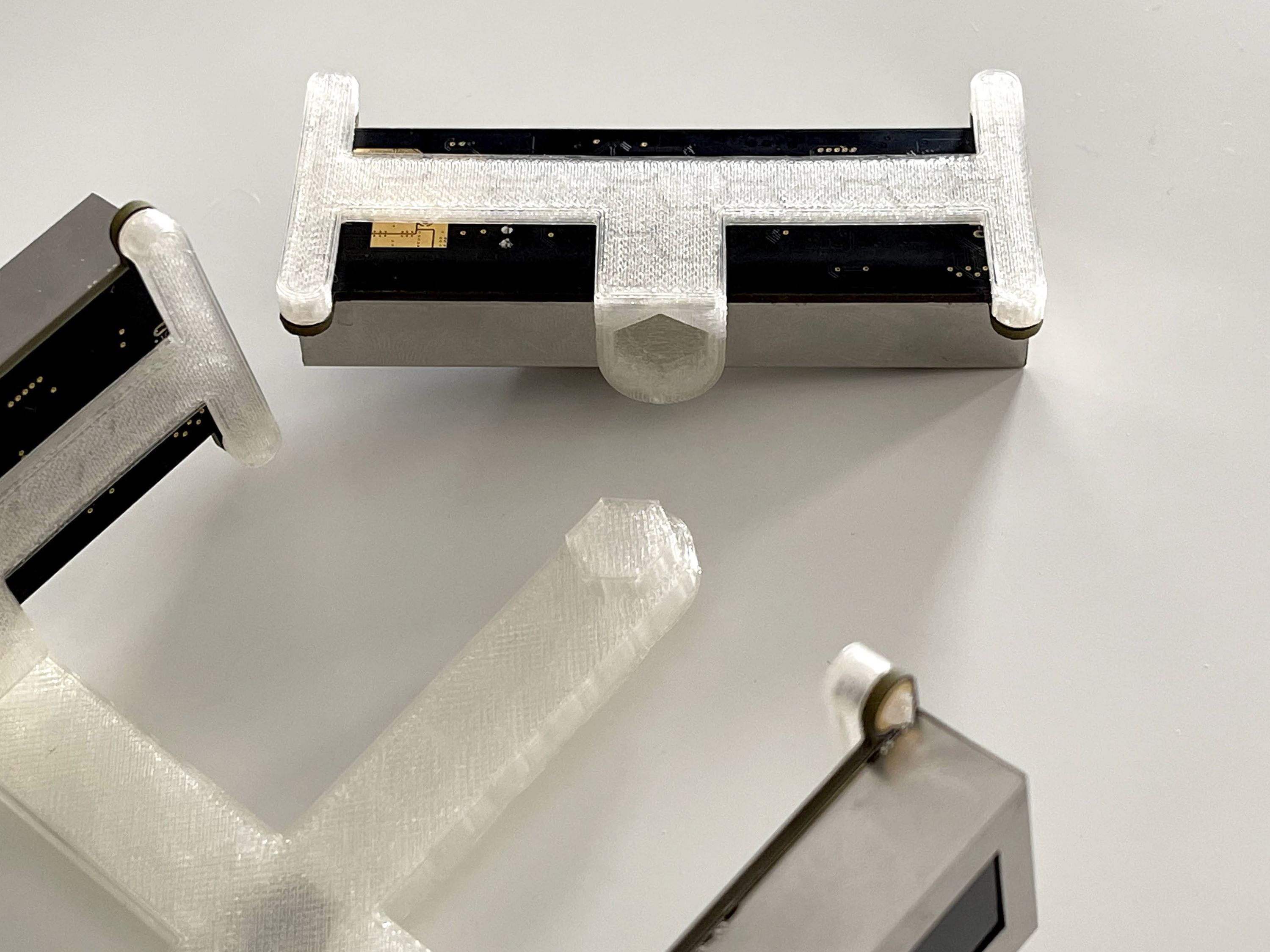
- Slide the nut into the bottom of the base. No need to use glue, the nut will fit very snuggly.
- Attach the 4 cameras to any tripod plate

- You're off to the races! Try using the
multiplecameras.pyexample program as a starting point for your multi-camera work.
Modifying the Mount
A few ideas on customizing this mount to suit your needs:
Using Fewer Cameras
If you don’t need a full 360˚ view, you can still use the Base design. Here’s a few options for using fewer cameras:
- The easiest way is to print the Base as-is but only mount 2 or 3 cameras.
- Before printing, you can do a plane cut on the Base STL object and only print 2 or 3 of the "arms". Just make sure to keep the middle piece with the indentation for the hex nut.
- Print the mount as is, then cut away the extra "arms" that aren't needed. Again, keep the middle piece so you can still connect the base to a tripod plate
Just be aware of balancing and tipping over in all cases!
Changing the Angle of the Cameras
Since the pegs are hexagon-shaped, you can try rotating the Tau Camera + Mount before attaching it to Base.
Design your Own Version
This design is meant to be a starting-off point! Feel free to design a version that meets your needs.
And don’t worry if the field of view of the Tau Cameras overlaps, there shouldn’t be any interference between Cameras.
Let us know what you think on the Onion Community!
If you have any thoughts, please let us know on the Onion Community. And absolutely let us know if you do make your own version!