Project update 4 of 7
Comparison Test: Rover Drive Test
by Sharon WangWe are happy to update you with the latest progress on our project. In this update, we share the results of our drive test, where we compared the performance of three different devices while driving a car on a fixed route: the Hyfix Rover, Ublox F9, and Septentrio Mosaic GO.
Test Setup and Equipment
To ensure a fair and accurate comparison, all three GNSS receivers were connected to a single high-quality antenna which was securely mounted on top of a vehicle. The drive test was conducted in an open area, providing a clear and unobstructed view of the sky to maximize satellite signal reception.
Data Collection and Results
Throughout the drive test, we utilized the data logging tool, strvstr to ensure precise data collection for all three systems. After completing the drive test, we analyzed the collected data to gain valuable insights into each receiver’s performance.
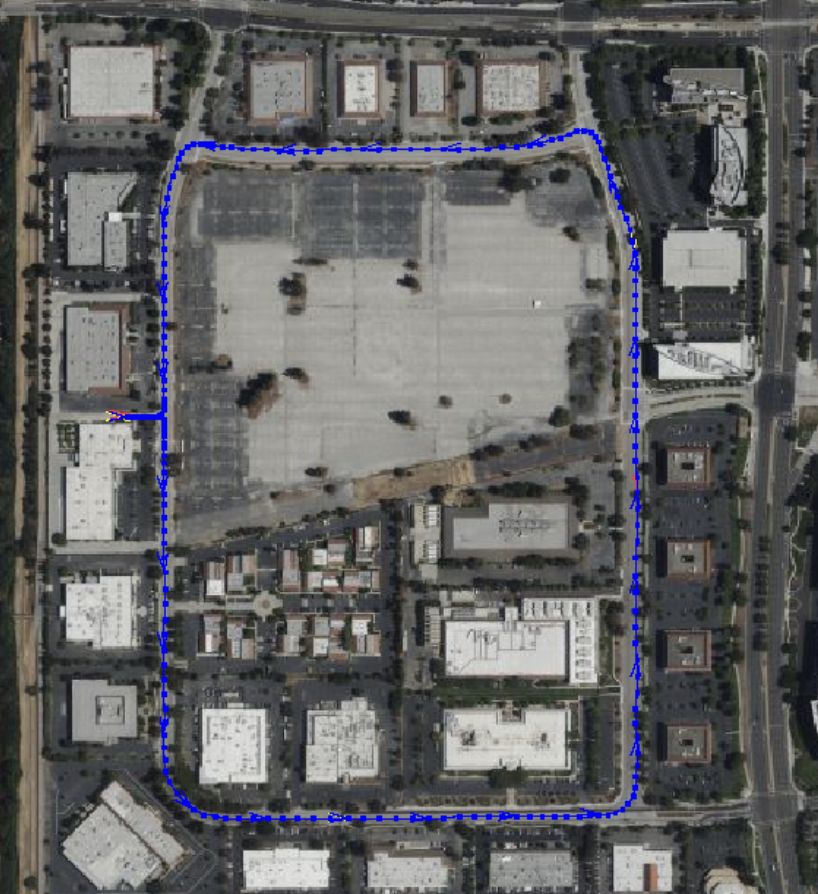
Route
This is a screenshot taken from JOSM showing the GPX track of the route taken for this drive test:
Results
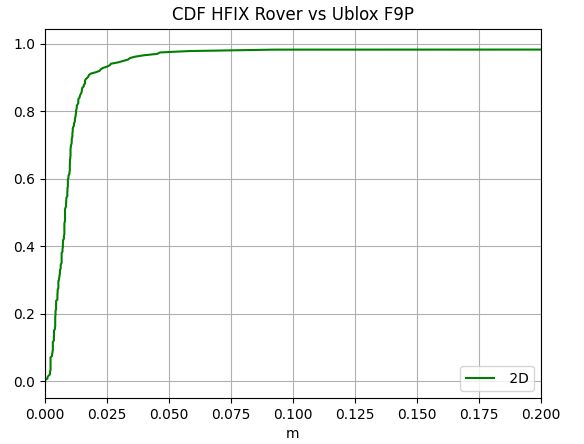
Below is a cumulative distribution function plot graph. This is a statistical way to show what probability a result has of landing within a certain error bound, and at what upper bound all results are contained within. It also provides valuable insights into the positional accuracy of our Hyfix Rover and Ublox F9 compared to the reference solution, the Septentrio Mosaic Go.
{update3-2-1 | small} The x-axis error bound is the distance between the tested Rover and Septentrio Mosaic. The y-axis is the probability of a data point selected at random from the drive will be within the x-axis error bound in meter. Shown below is another CDF plot graph that compares the Hyfix Rover directly to the Ublox F9.
Conclusions
- Our drive test comparison using the first CDF plot offered information regarding the Hyfix Rover and Ublox F9’s positional accuracy relative to the reference solution, the Septentrio Mosaic Go.
- The consistent error distributions between the devices suggested comparable accuracy performance.