Project update 2 of 7
Test: Does HYFIX RTK Rover Really Have Centimeter Accuracy?
by Sharon WangWelcome to our first update about the RTK Rover and thank you for your support!
We have conducted several tests that demonstrate how HYFIX’s low cost RTK Rover can get centimeter accuracy at the same quality as its competitors. Let’s take a closer look at the test we conducted using the following rovers:
- Ublox F9 rover with the capabilities of dual-band L1/L2
- Hyfix Rover contains Quectel LC29H with the capabilities of dual-band L1/L5
- Septentrio rover contains mosaic-X5 module with the capabilities of L1/L2/L5 and considered a higher-end receiver
The Septentrio was used as a reference for the test. The Ublox F9 and the Hyfix Rover are commonly considered IoT-grade.
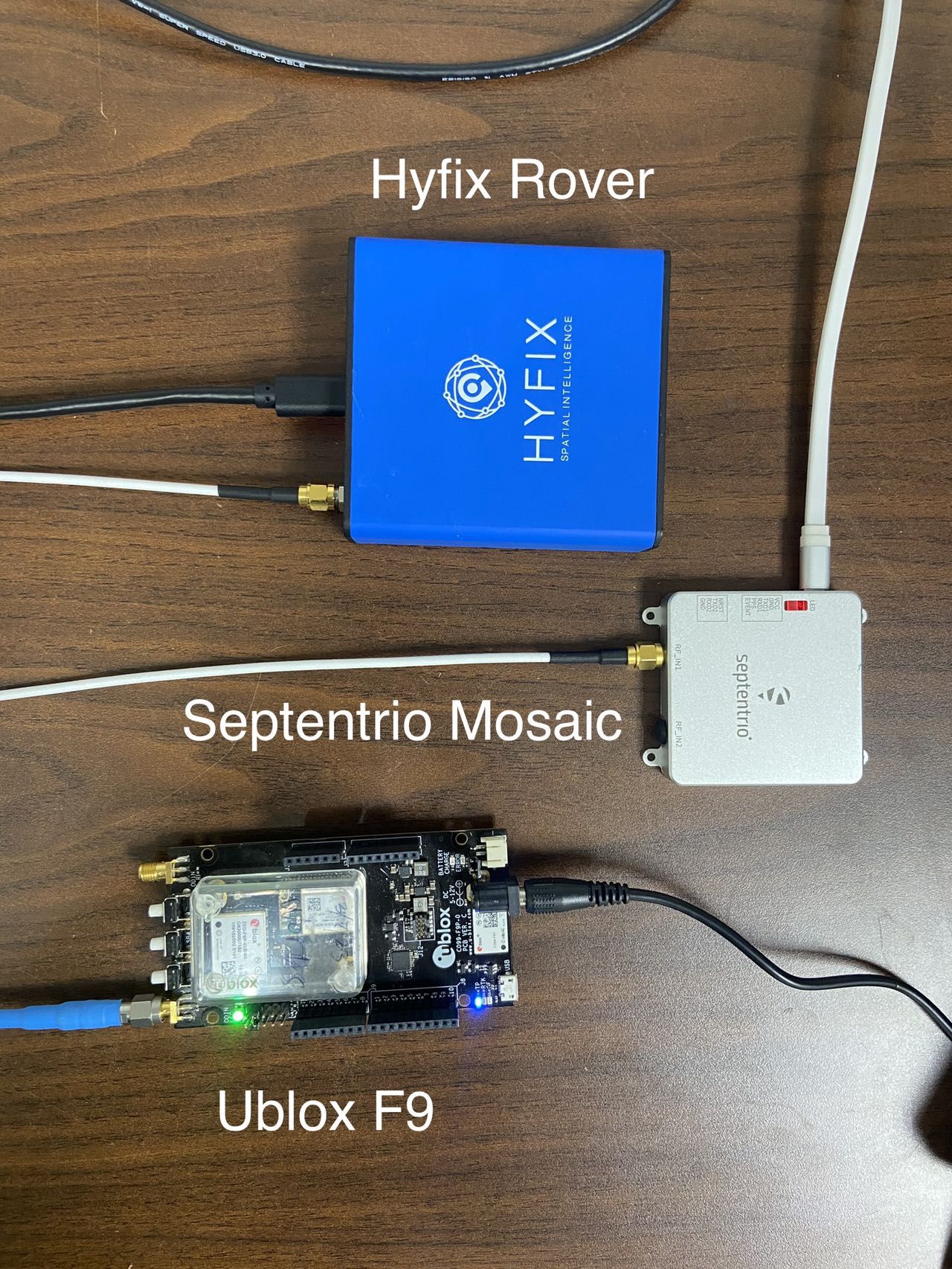
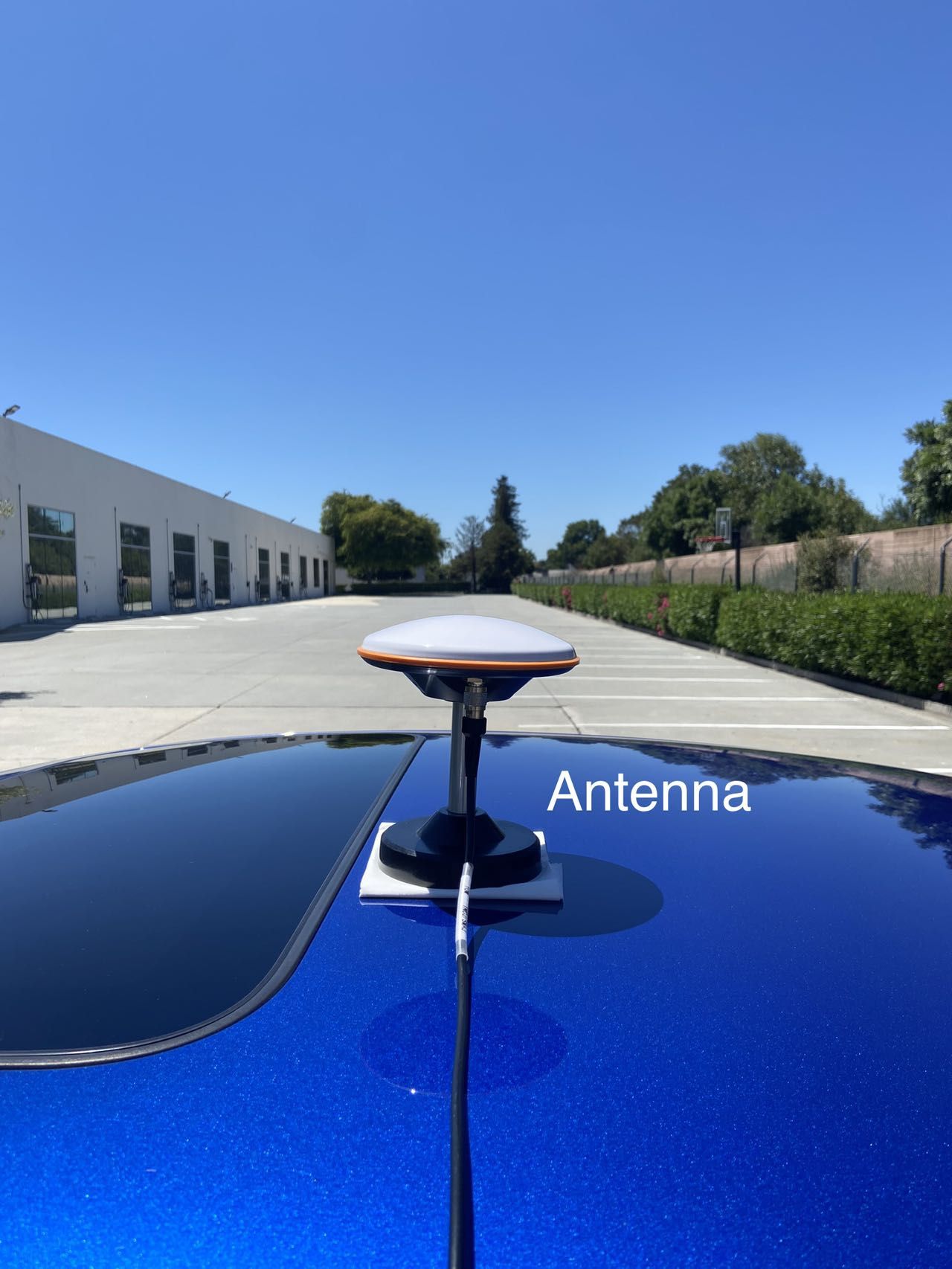
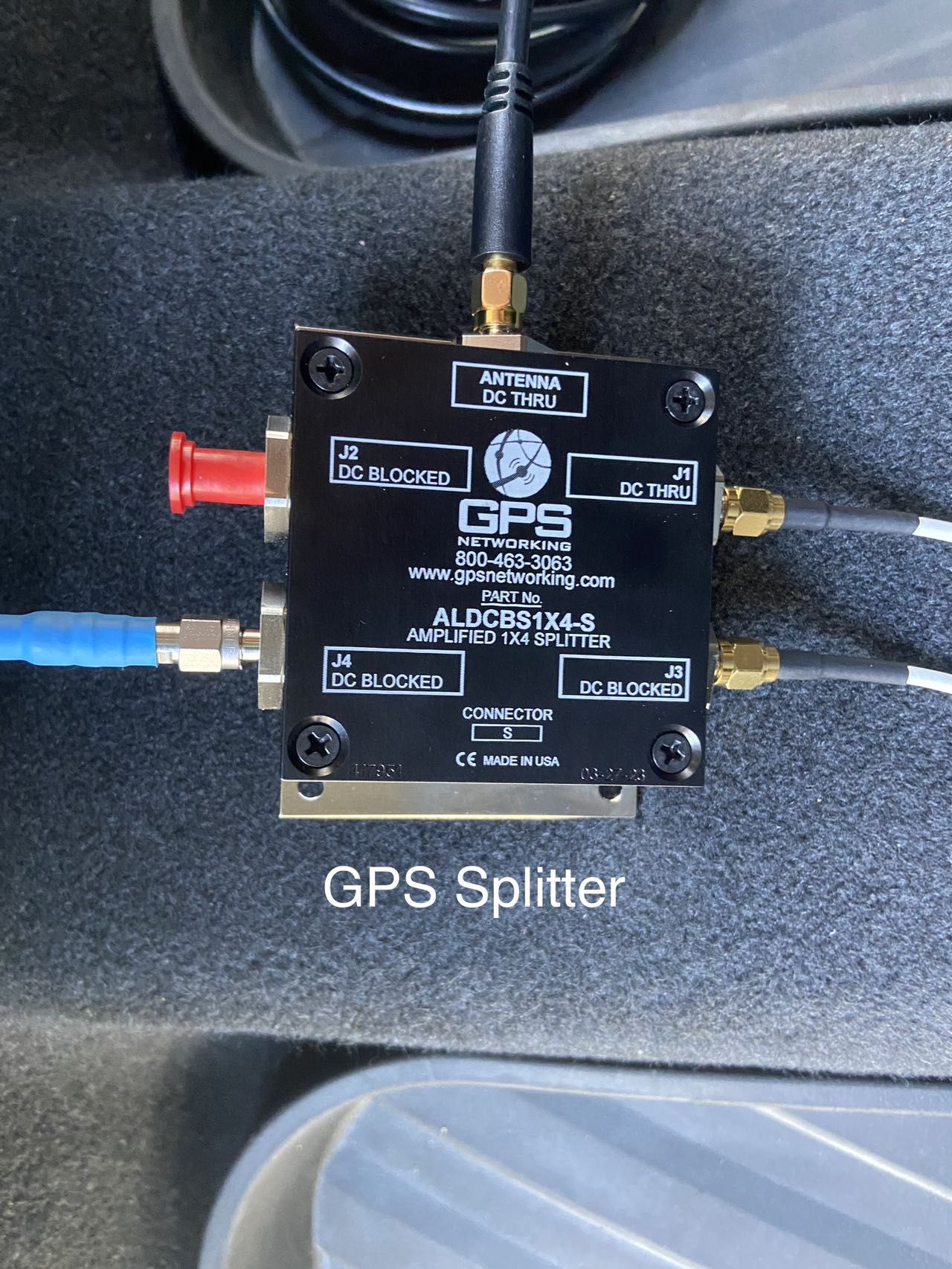
The test method for static accuracy involved the use of three different rovers: Hyfix Rover, Ublox F9, and Septentrio Mosaic. These rovers were connected to a GPS splitter, which in turn was connected to a common antenna. The Septentrio Mosaic Go served as the reference for the test. The same GEODNET GNSS RTK corrections are fed into all three RTK rovers (Hyfix, Ublox F9 and Sepentrio Mosaic GO) with a convenient tool “STRSVR” found in RTKlib. RTKlib is an open-source GNSS positioning library that offers various algorithms for real-time and post-processing positioning, including Real-Time Kinematic (RTK).
STRSVR forwards the Sepentrio Mosaic NMEA GGA position ouput message to the GEODNET NTRIP caster server, and in response GEODNET streams GNSS corrections via STRSVR to all three receivers in parallel.
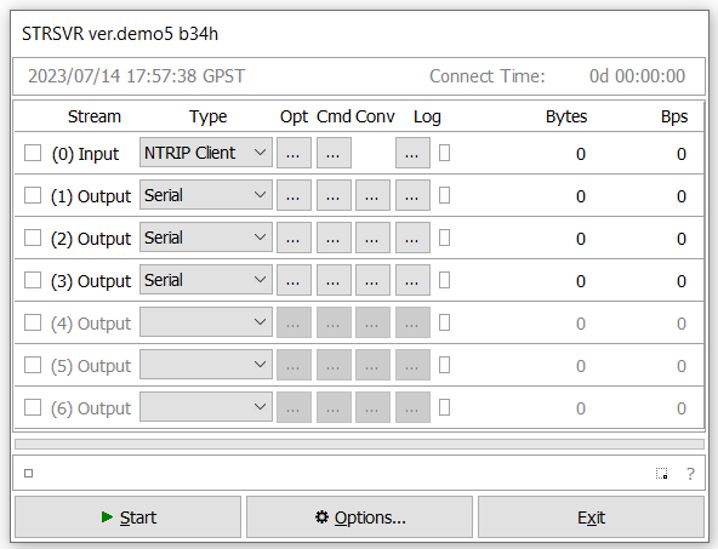
NTRIP Client: The Geodnet Network was used as the NTRIP caster to provide RTK corrections. Serial: The serial connection from the three different devices were used. Once the devices were powered on and had a clear view of the sky, the data logging process began. Again, the STRSVR came in handy and facilitated data logging from all three rovers in parallel.
The GEODNET network corrections enhanced the accuracy of all three devices under test, and all three devices instantly achieved “RTK Fixed” status, which is the highest level of accuracy achievable – typically <2cm when you are near a GEODNET base station.
In summary, the test method for static accuracy involved connecting the rovers to a common antenna using a GPS splitter, logging data with the "STRSVR" utility from RTKlib, obtaining RTK corrections from the GEODNET network, and analyzing the data to compare the rovers’ position solutions with the reference solution.
Voila! Here are our results that show RTK Rover really is centimeter accurate and just as good or better than some of its competitors.
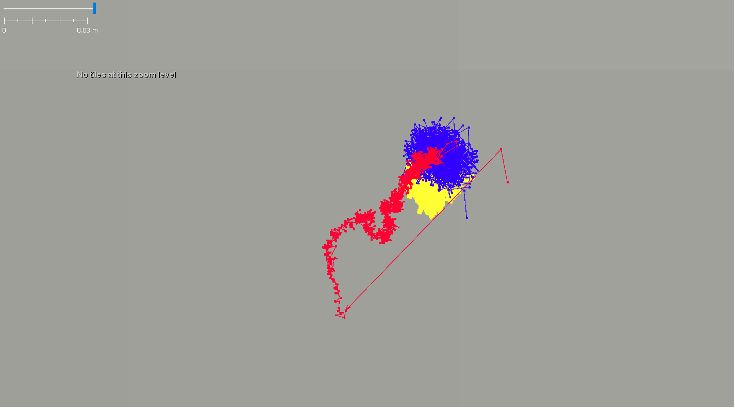
This is a screenshot from JOSM (Java OpenStreetMap Editor) with the different log files as inputs.
| Yellow = Septentrio Mosaic | Blue = HYFIX Rover | Red = Ublox F9 |
Got questions for us? Use the “Ask a Question” form to contact us!