First off, I’d like to thank all of our supporters for helping this campaign reach 100% of its funding goal. It looks like we’re going to be building some hardware!
Teaching with Snekboard
We’ve been teaching LEGO robotics for a number of years. Our teaching mentor developed some curriculum based on Logo and Robolab which we first adapted to the Arduino and have now adapted for Snek running on the Snekboard.
This fall, we’ve been spending some time writing down those lessons and have created material that is designed to be a series of self-directed lessons for learning about Snek, Snekboard and LEGO robots. The lessons are available in HTML and PDF form from the sneklang.org website.
Lesson 1: Introduction to Snekboard
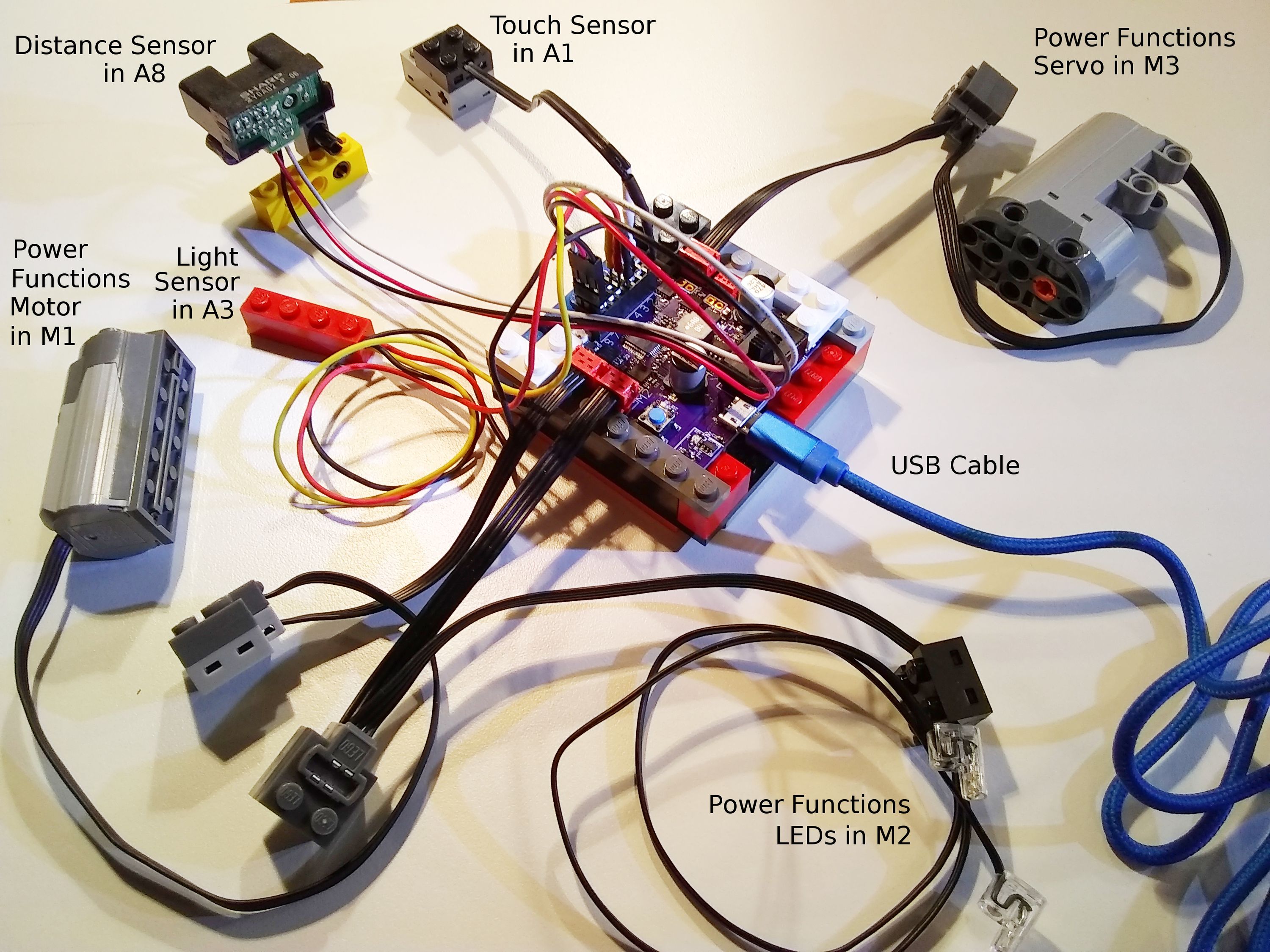
This lesson (PDF) covers basic motor and sensor usage while introducing the key components of the Snek environment:
- Snek
- Snekboard
- Mu editor
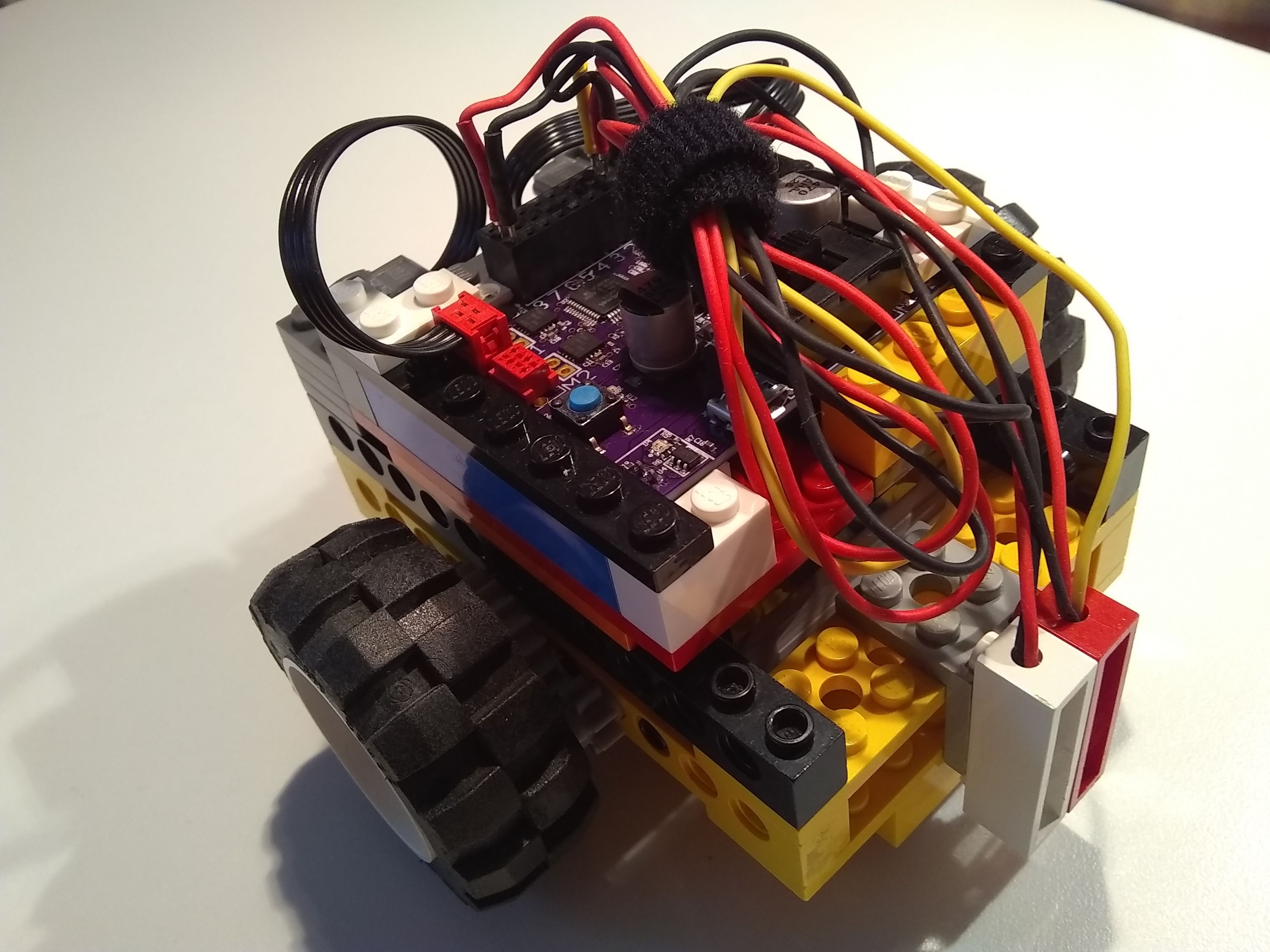
Lesson 2: The Line Bug
Now we get to build a robot! This lesson (PDF) contains detailed assembly instructions for a robot that can follow a line on the table, using the contrast between the table and the line. It starts by guiding the programmer in how the robot can “see” with a phototransistor and then moves through a step-wise refinement to build a working program.
More Coming Soon!
We’re working on writing up two more lessons and will post those soon.
You’ll find all of the lessons on the sneklang.org web site linked from the Documentation page.