Project update 6 of 14
Homing Sensor Functionality, And A Physical Event In Tokyo
by KantaA Physical Event In Tokyo on October 24th
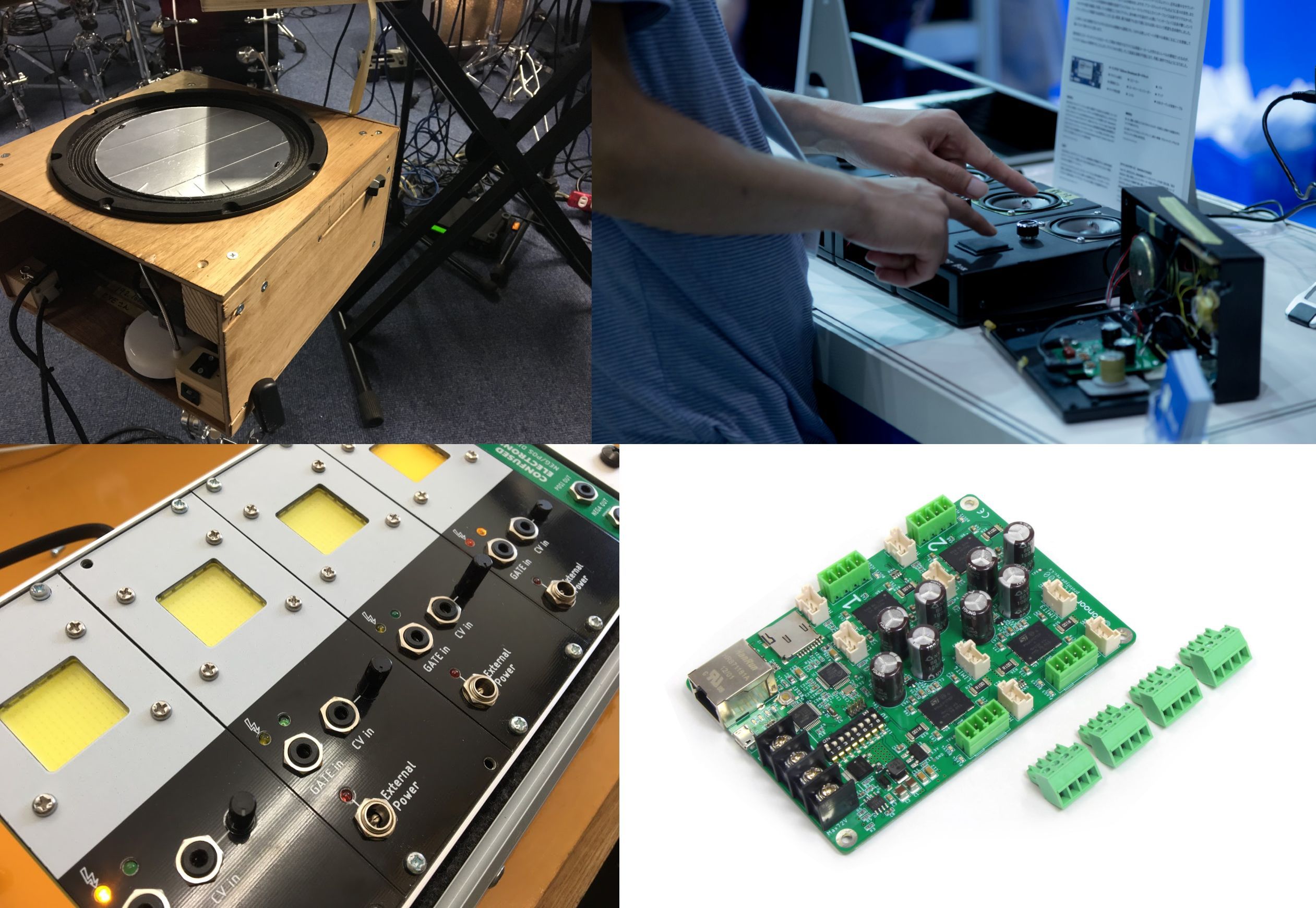
We’ll be hosting a physical open studio this Saturday, October 24th! At this event, you can try out STEP400 in action. We will also have some demonstrations with winch and slider mechanisms, as well as our original prototypes of sound-tactile interfaces. And yes, some beverages. If you’re in the Tokyo area, please join us! For more information, please check here.
I will connect to our Discord server at the same time so you can watch it as a stream. Feel free to talk to me as I show you the details of the demo, and ask any questions you may have! Here is the invitation link.
Homing Sensor Functionality
Now, in this and the next update, I’d like to focus on the features of STEP400. In this post, I’ll give you an overview of homing.
When the system powers up, it doesn’t know where the motor is currently positioned. It could be pointing to various directions depending on the timing of the last time the system was shut off.
Also, if an external force exceeding the limit is applied to the stepper motor, the step will slip out of alignment (stall). If this happens, the motor will continue to work with a misalignment between the programmed and physical positions.
Therefore, applications that have a position or orientation must use sensors to detect a reference position at startup or periodically. This action is called homing.
STEP400 Homing Commands
STEP400 has some homing commands inherited from the Motor Driver Chip PowerSTEP01. The first one is the /goUntil command, which moves the motor towards the home sensor, and then the /releaseSw command, which corrects excess after stopping at the sensor. You can see how they work together here:
More information is available on the documentation page, along with examples of sensors and commands.
Next?
The next update will include demos of current and voltage modes and microstepping.
See you!
Kanta