Project update 34 of 38
C++ and Python Performance Comparison and Compute Module Kitting Issues
by Eugene PomazovCompute Module eMMC and Lite kitting issues

We use Compute Module 3+ Lite in our Starter and Deluxe kits. But some of kits owners faced a problem - their StereoPi was not able to boot with installed micro SD. After digging out we found, that actually these users received kits with 8 GB eMMC equipped Compute Modules, but not Lite editions. Actually, these Compute Modules a bit more expensive then Lite. But they are unable to work with micro SD cards, as we described at the beginning of this video:
After detailed situation analysis and discussion with our kitting partner, we were able to find a reason of this wrong kitting. Looks like within a hundreds of Compute Modules 3+ Lite, used for assembling a kits, one wrong box with eMMC equipped CM3+ has been used. So we can expect about 30 non-Lite Compute Modules in our previous batch (1200 pcs).
If you’re one of these users, who got eMMC revision - you may use it as shown in a video mentioned. But if you definitely need Lite version - please contact us, and we’ll do CM3+ replacement for you!
Python vs C++: who is better for OpenCV beginners
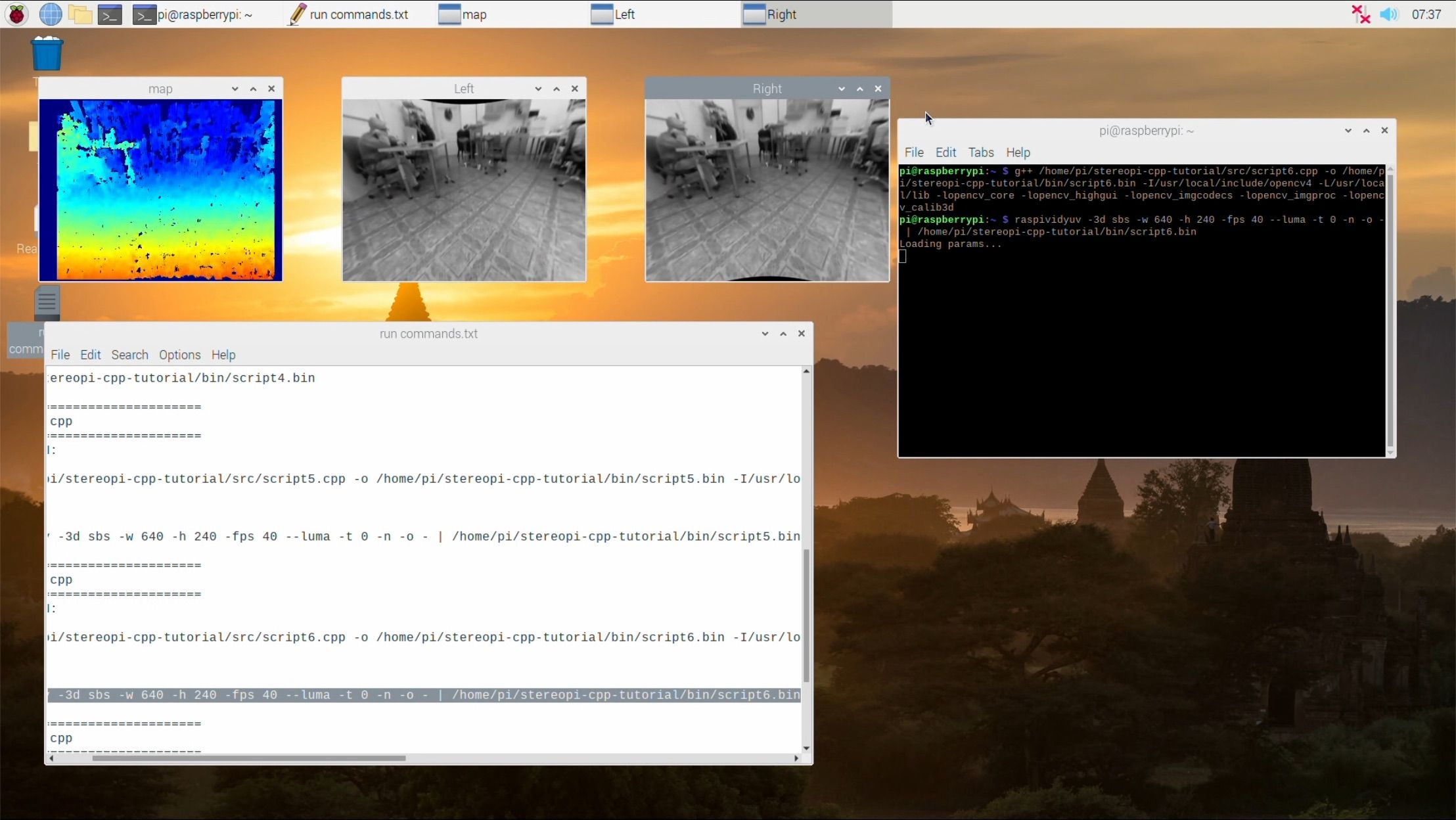
In most of our tutorials we use Python language. You often hear that Python is too slow for computer vision, especially when it comes to single-board computers like Raspberry Pi. In this article, we decided to measure the actual speed difference and find the performance ‘bottleneck’. The approach is very simple. We have a series of small Python programs that allow you to go through all the stages from the first launch of the stereo camera and its calibration to building a depth map from real-time video (and a 2D space map in a mode that emulates the operation of a 2D lidar). We ported all this code to C++, and we compare performance at each stage. You can read full article here in our blog.
One more notice
We’re in a process of moving all articles from our blog on Medium to our own site. So you can find all articles and news in a one place here: https://stereopi.com/blog If you find some issues with our new blog - please don’t hesitate to inform us on our forum.