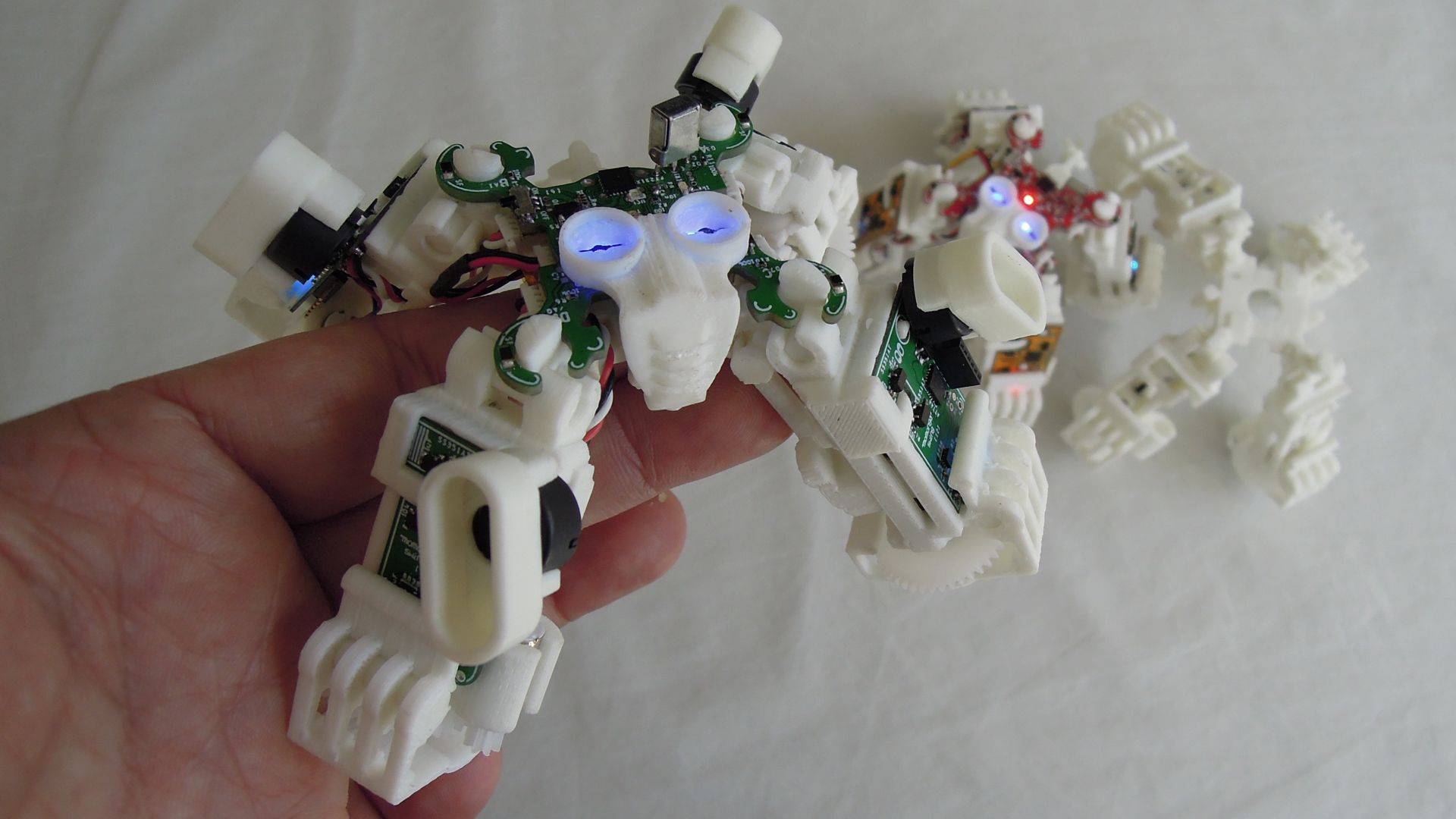
MOMONGA is a palm-sized, open source spider robot that has 4 built-in servo motor mechanisms made with 3D printing. They are expressive through movement and their two RGB LED eyes, and have emotive sound using the four piezo speakers. MOMONGA robots can be interactive, using their four light sensors to detect hands as objects.
The robots are programmable with Arduino IDE, so it’s easy to customize. You can also create original body parts using your own 3D printer. In addition to the standard IR controller, there are optional controllers that can be connected to a mobile device with BLE, or can be connected to various user systems such as RaspberryPi through UART communication.
MOMONGA spiders fit right in with hobbyists, robot enthusiasts, and in educational environments.
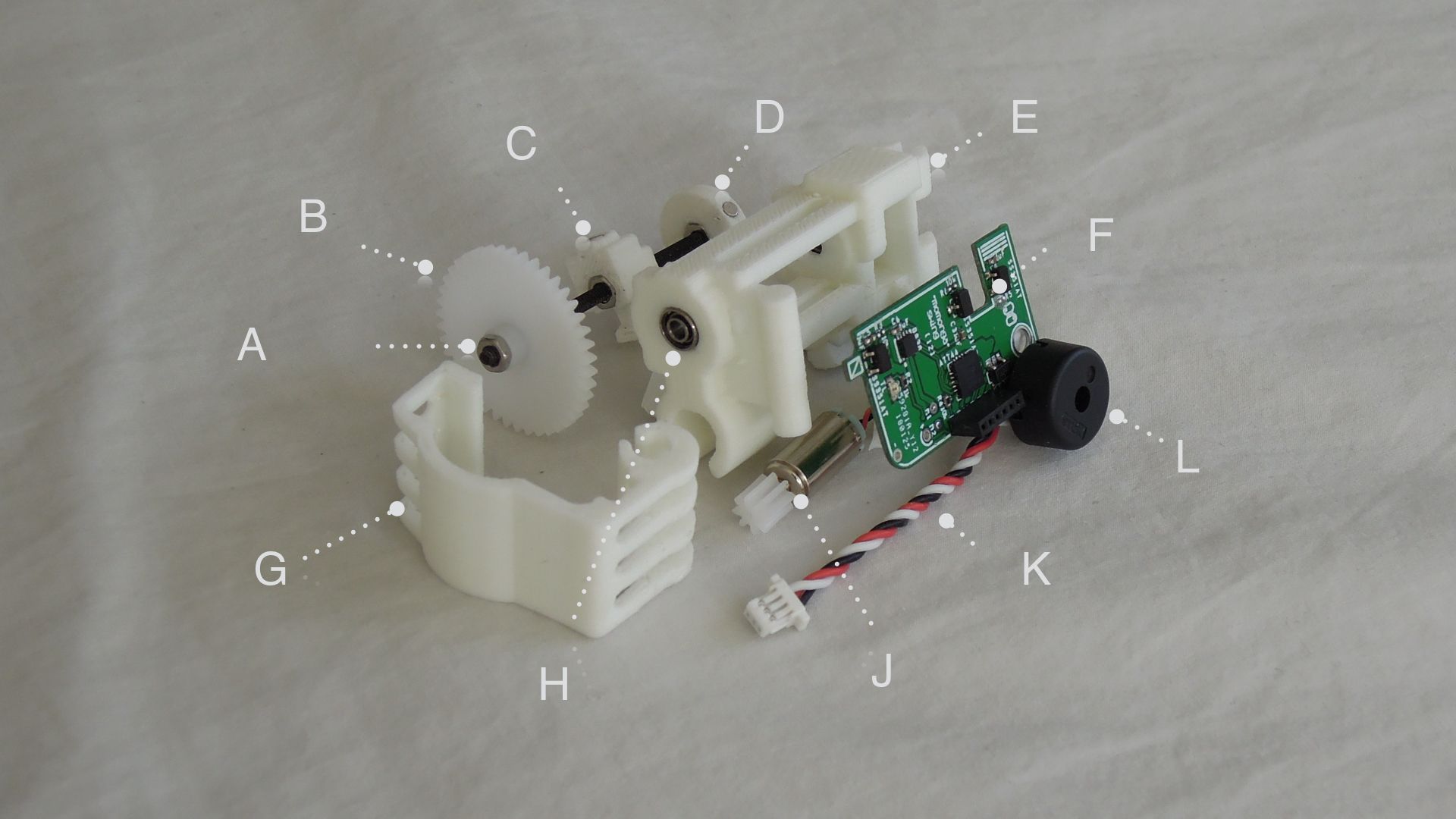
A. 2 mm screw shaft
B. 42T spur gear
C. Link slider with magnet
D. Rotating disk with magnet
E. Leg chassis
F. Leg control board (ATtiny84, Hall effect sensor x3, motor driver)
G. Foot cover
H. Ball bearing x2
J. DC Motor with 8T pinion gear
K. Interface cable
L. Piezo speaker