Vinci Innova
Robotics & Motors
Industrial Automation
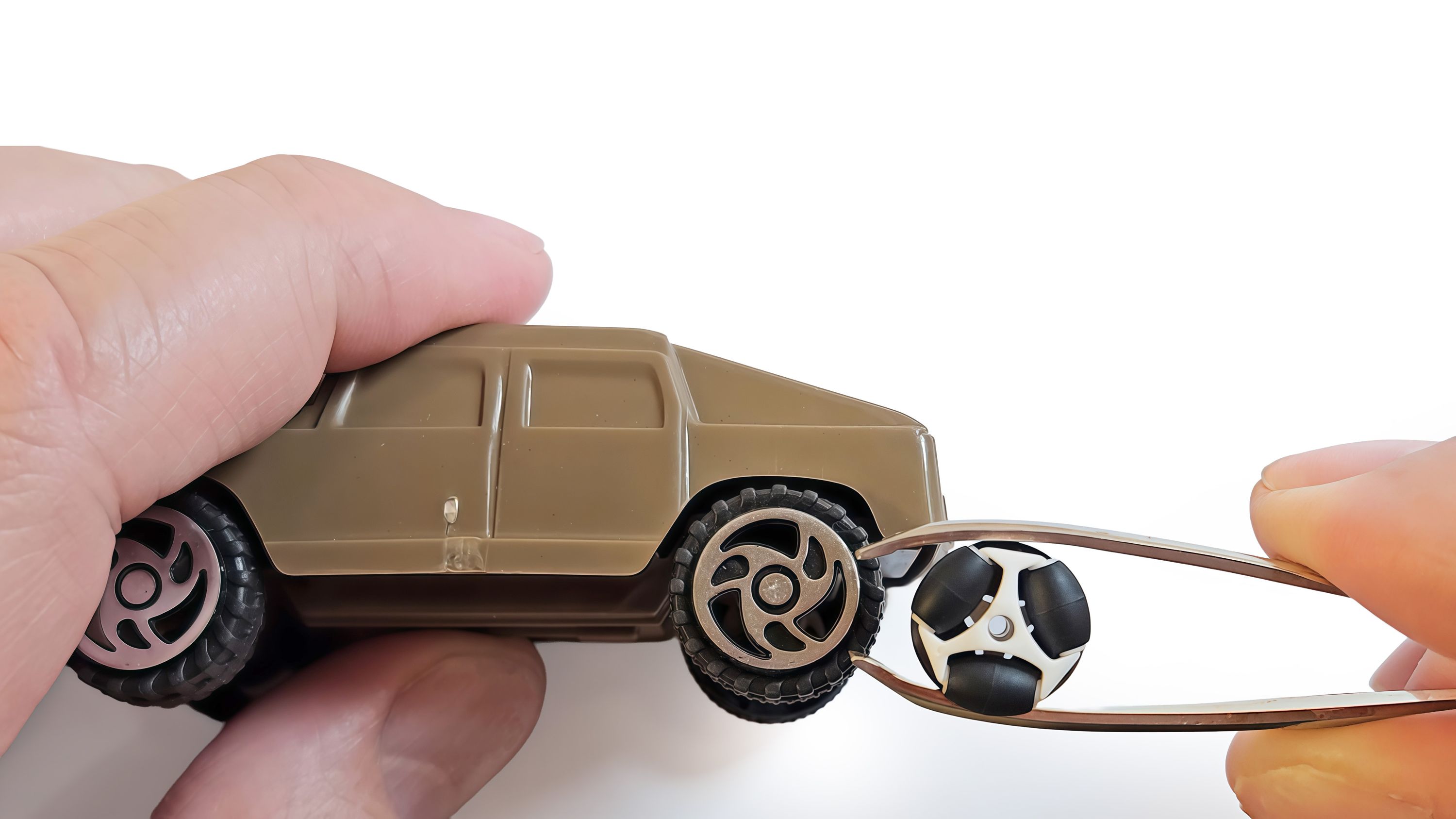
Vinci Micro Omni Wheels
Tiny omnidirectional wheels for robots

This project is launching soon.
0
updates
updates
Vinci Innova
Robotics & Motors
Industrial Automation
This project is launching soon.
Vinci Micro Omni Wheels are ultra-compact omnidirectional wheels designed specifically for micro robotics and precision motion systems. While traditional omni wheels are too large for small-scale applications, these wheels enable smooth, controlled omnidirectional movement in extremely compact designs. These are the smallest omni wheels currently available.
These wheels solve a key limitation in robotics: the lack of high-quality omni wheels at very small sizes. With a focus on precision, reliability, and manufacturability, Micro Omni Wheels open the door to a new generation of small, agile robots.
Designing small robots is often limited by available mechanical components. Standard-sized omni wheels are simply too large for compact designs, forcing engineers to either increase the size of their robots or abandon omnidirectional movement altogether.
Until now, designers of small robots had to choose between these compromises. Vinci Micro Omni Wheels remove this limitation.
They make possible:
• True omnidirectional micro robots that were previously impractical due to size constraints
• Compact robotic platforms for research and education that fit in constrained environments
• Swarm robotics systems, where size, weight, and scalability are critical
• Miniature robots for inspection or exploration, capable of precise lateral movement
• Precision positioning systems in tight spaces
In many cases, these types of robots were either impossible or significantly limited using existing components.
Whether you are building a small autonomous robot, a research prototype, or an innovative mechanical system, these wheels allow you to achieve true omnidirectional motion at a scale that was previously out of reach.

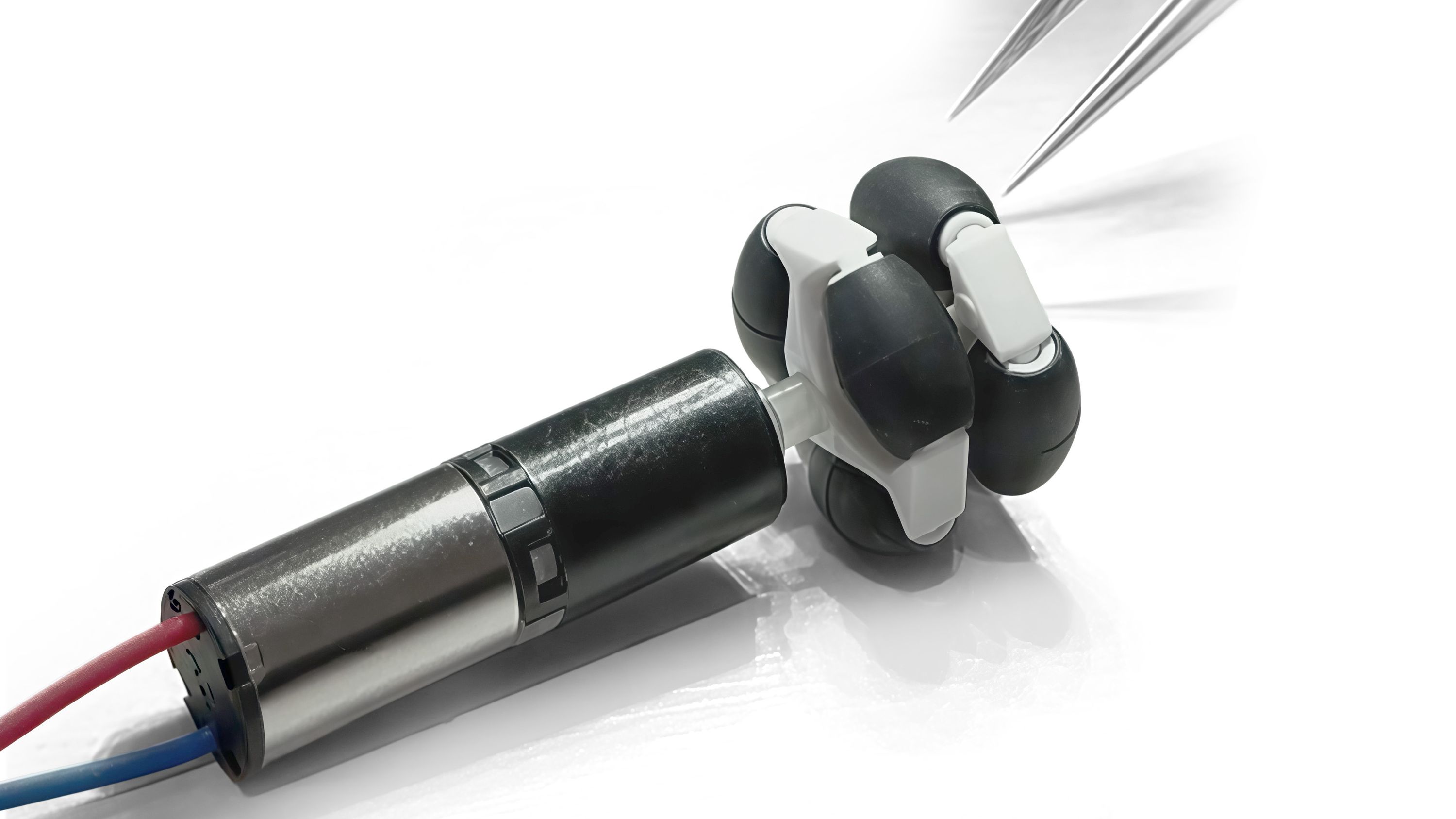
• Wheel type: omni wheel with passive rollers
• Diameter: 0.45 in (11.5 mm)
• Width: 0.29 in (7.5 mm)
• First Shaft Hole: 0.078 in (2 mm)
• Second Shaft Hole: 0.059 in (1.5 mm)
• Shaft interface: Press-fit design for quick and secure mounting without screws or adhesives
• Frame Material: Plastic
• Roller Material: Silicone
• Number of Rollers: 6
• Low friction rolling
• Stable lateral movement
• Suitable for continuous operation
• Designed to minimize vibration and misalignment
We plan to make resources available for the open source robotics community. In particular, we are planning to build a tiny robot using our wheels and share how it has been designed and assembled.
This will include providing 3D printable files as well as the source code, so users can replicate and build upon the project. We believe this will help demonstrate the capabilities of the wheels and make it easier for others to integrate them into their own designs.
You can sign up at the top of this page to be notified when the campaign launches and to receive other updates. We only send out relevant content, and you can unsubscribe at any time.

We aim to bring new approaches and breakthrough thinking to the development of next-generation technologies.