Project update 4 of 9
Wi-Fi Stepper is Fully Funded!
With your help, we have reached our goal to fund the Wi-Fi Stepper! From all of us at Good Robotics, thank you for your support.
We’ve finalized the last revision of the PCB and are in the process of getting it fabricated. The design has been updated with EMI reduction and input safety circuitry. We’re excited to show you our work.
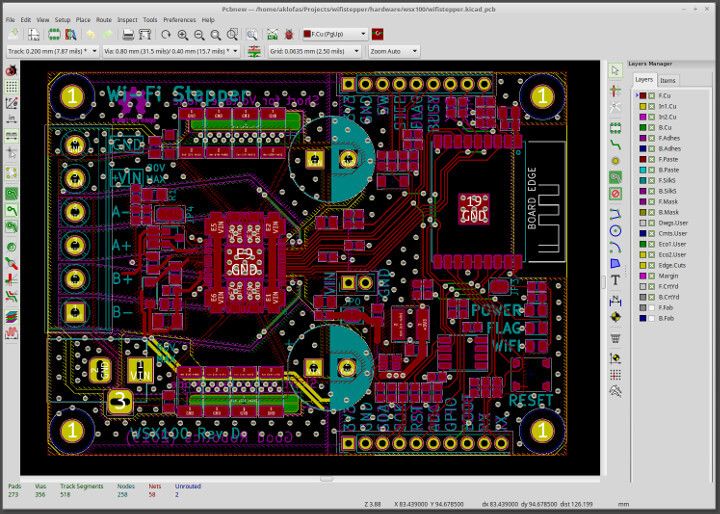
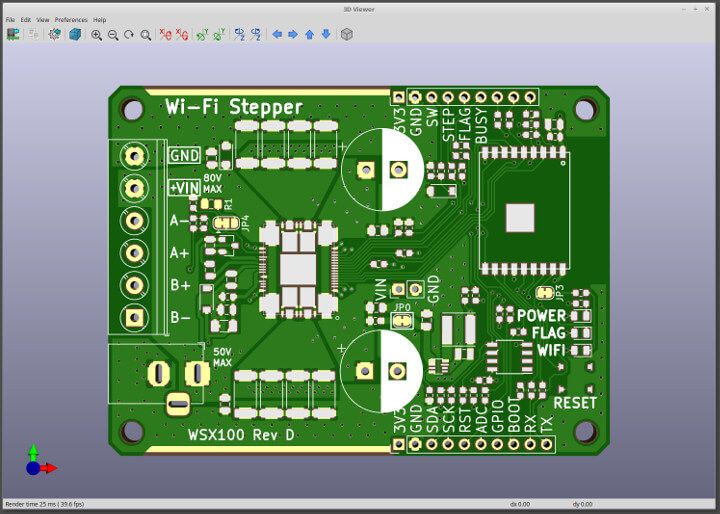
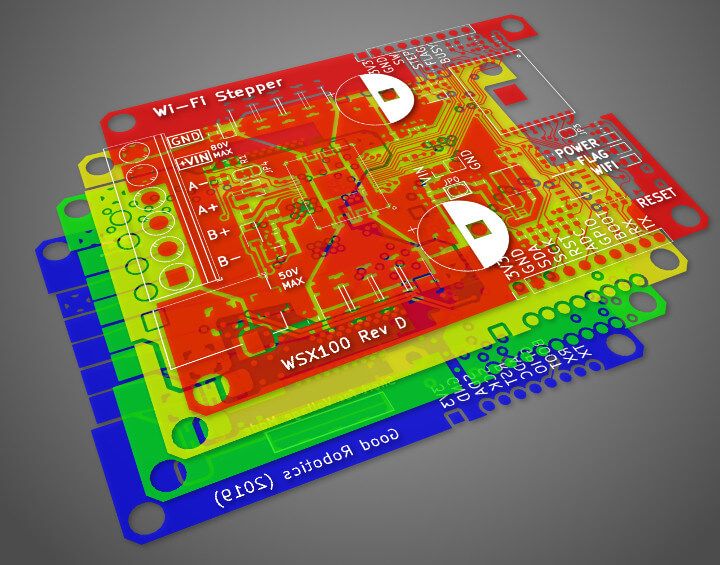
The PCB utilizes 4 layers with ground separation for the high current motor signals. We’ve beefed up the copper traces in high current areas. All IO-pins have small series resistors to provide EMI mitigation and static-discharge safety.
With additional board-level safety features, we’ve had to lower the maximum input voltage by 5 volts from 85 to 80 V. Using large motors at high voltages, it’s easy to exceed the 85 V with back EMF. We’ve added safety circuitry that prevents damage to the board. Overall, it’s a much better design. We believe it’s worth it though it does take off a few volts from the upper limit.
Special thanks to Imre Csaszar and Matthew Kaufman for helping with the EMI design, layout, and safety features.