
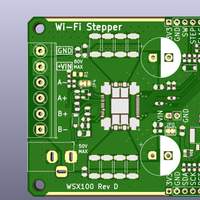
Securing the Wi-Fi Stepper
Hello everybody. As we get close to delivery, we thought we would share with you the security framework we've built into the Wi-Fi Stepper. Given that the board supports large stepper motors with high voltage and current, hacking could result in damage and injury. To us, security is a big concern and we need to get it right. To that end, we'd like to share with you the design choices and methodology used to secure the Wi-Fi Stepper and prevent unauthorized access. Read the full update.
Production Delay
We have a quick update on the delays we're experiencing in sourcing and manufacturing the boards. Read the full update.
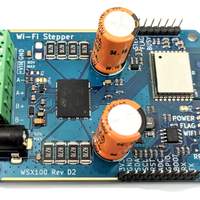
Ramp to Production
Hello everybody! We're pleased to announce that the Wi-Fi Stepper board design is finally complete. Read the full update.
Campaign Ending Soon
The Wi-Fi Stepper campaign is ending soon. Thank you to all the backers for making this successful! Read the full update.
Max Speed and Torque
For this update, let's discuss the performance of stepper motors and specifically the torque/speed curve. Read the full update.
Wi-Fi Stepper is Fully Funded!
With your help, we have reached our goal to fund the Wi-Fi Stepper! From all of us at Good Robotics, thank you for your support. Read the full update.
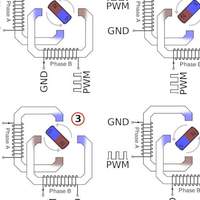
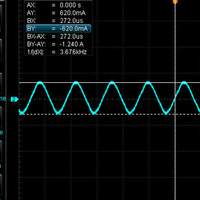
Configuring Drive Voltage and Current
In this update, I'll be discussing how the Wi-Fi Stepper controls the voltage and current of your stepper motor during operation. Read the full update.
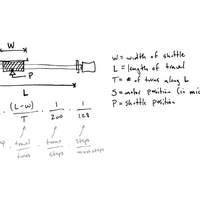
Homing
Wow! In just a few days we've reached over 40% of our funding goal! We're off to a great start, thank you all so much! Read the full update.

The Wi-Fi Stepper Campaign is Now Live
I'm excited to announce that the Wi-Fi Stepper campaign is now live. Read the full update.