The next industrial revolution is happening right now. New connected devices and robotics are redefining the way work is done. Big business has already realized that the way of the automation and high-tech robot-based manufacturing is the way of the future. Now the same trend is transforming the consumer and services markets. There is no better time to be a robotics engineer and maker - the world needs your bold ideas. You only need tools to make them happen.
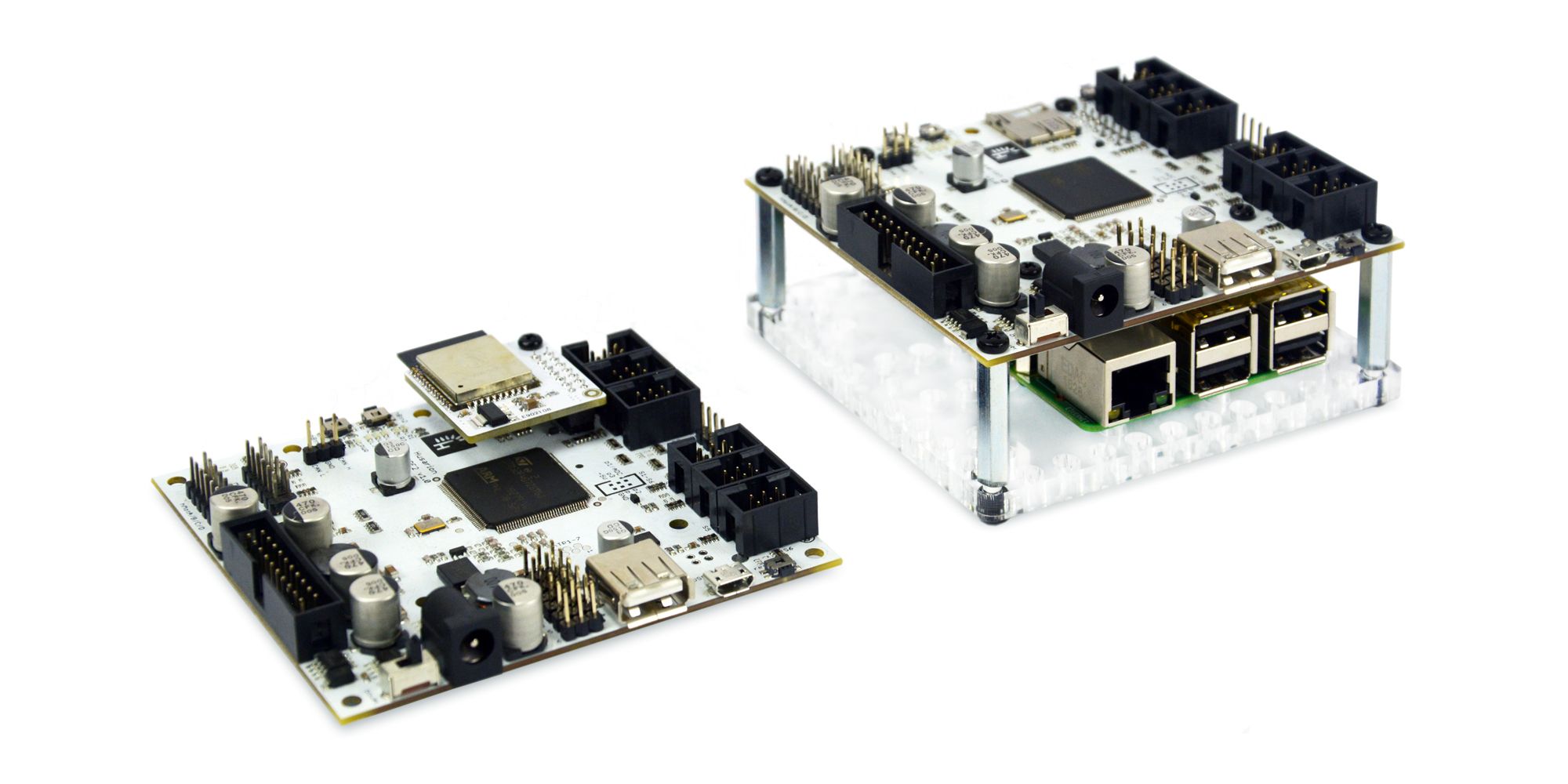
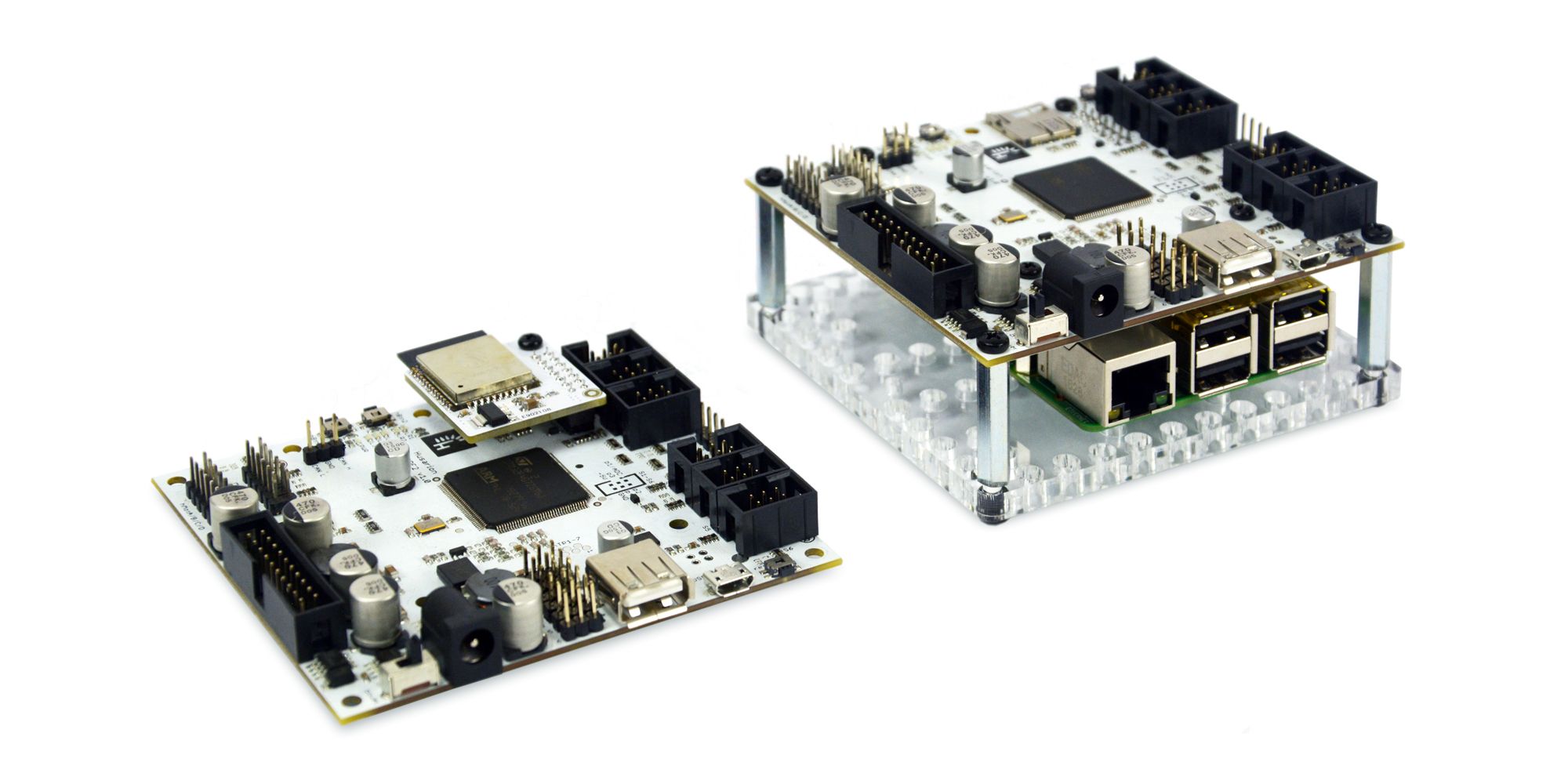
Husarion CORE2 is a computer designed for fast prototyping of robotic projects. It interfaces directly with motors, servos, encoders, sensors, so without additional shields you can easily build large variety of robotic of mechatronic projects.
It is available in two configurations:
CORE2 - a low-power, cloud connected real-time computer with Wi-Fi
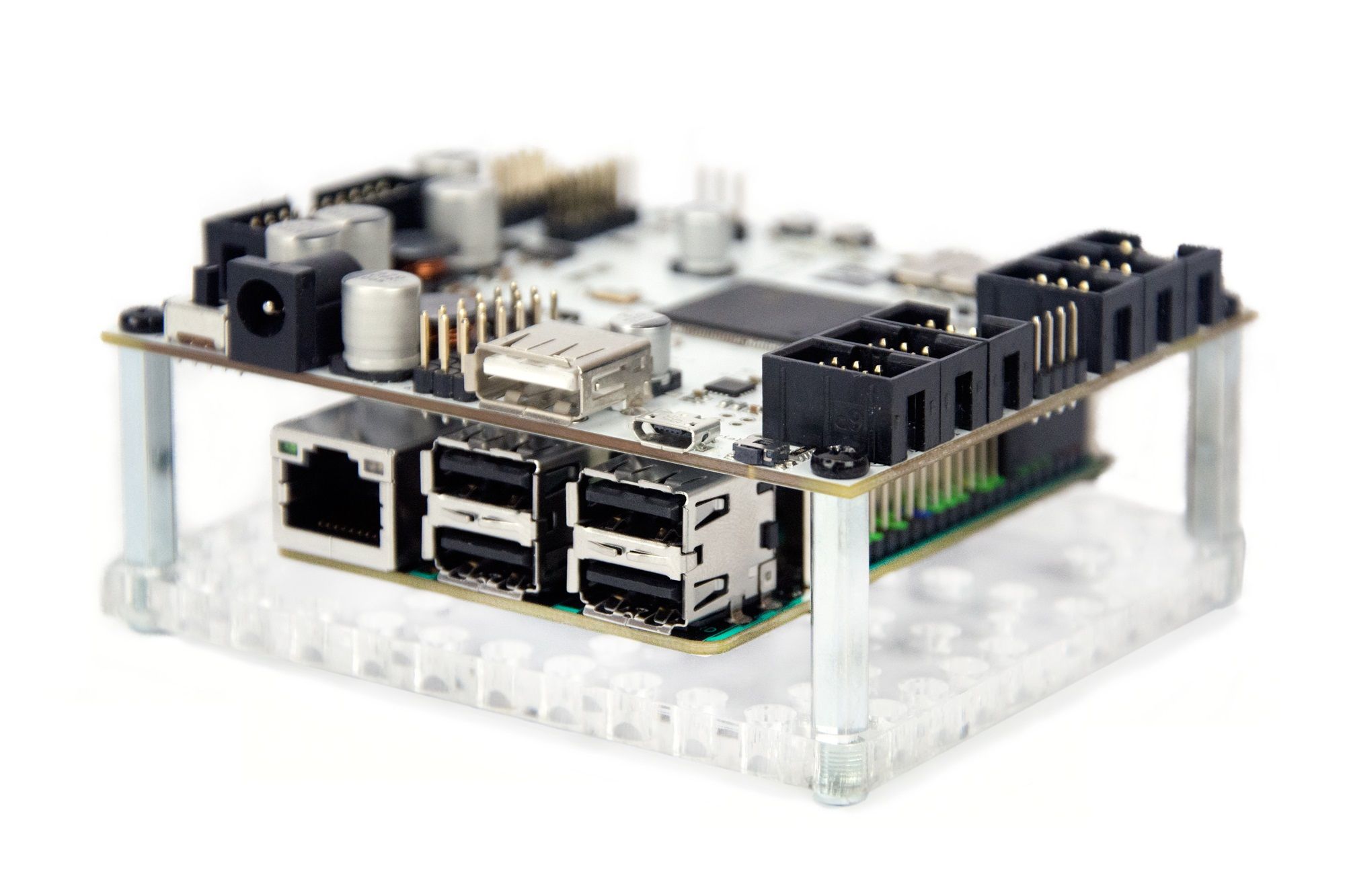
CORE2-ROS - an ROS powered, cloud connected computer with Wi-Fi combining real-time capabilities and high computing power. Ideal for autonomous robots.
It’s not only about hardware. Wouldn’t it be great if robotics was as simple as coding a website? Web developers enjoy proven, ready-to-use tools, frameworks, hosting platforms, tutorials, and examples. If only you, the robotics developers, could enjoy the same advantages. It would remove unnecessary work from your shoulders and let you focus on what really matters - the idea, the problem your device will solve and how it will do it.
That’s the goal that we’ve set for ourselves creating the Husarion platform. We provide you with embedded hardware, preconfigured software, and easy online management. You can start building your first prototypes with LEGOs and iterate them with subsequent 3D-printed or laser-cut versions of mechanics without having to develop hardware and software from scratch. From the very beginning of your project up to mass manufacturing and deployment, you can use the same Husarion solutions every step of the way.
Building advanced robots should be as easy as creating websites. This is the challenge we took on.
Our tools are meant to accompany your robotics project throughout development - from humble beginnings in your garage to fully-fledged development facility and mass manufacturing. It doesn’t matter if you are:
…the Husarion platform will jump-start your robotic project.
Intrigued? Let’s take a look at hardware details that makes it all work.
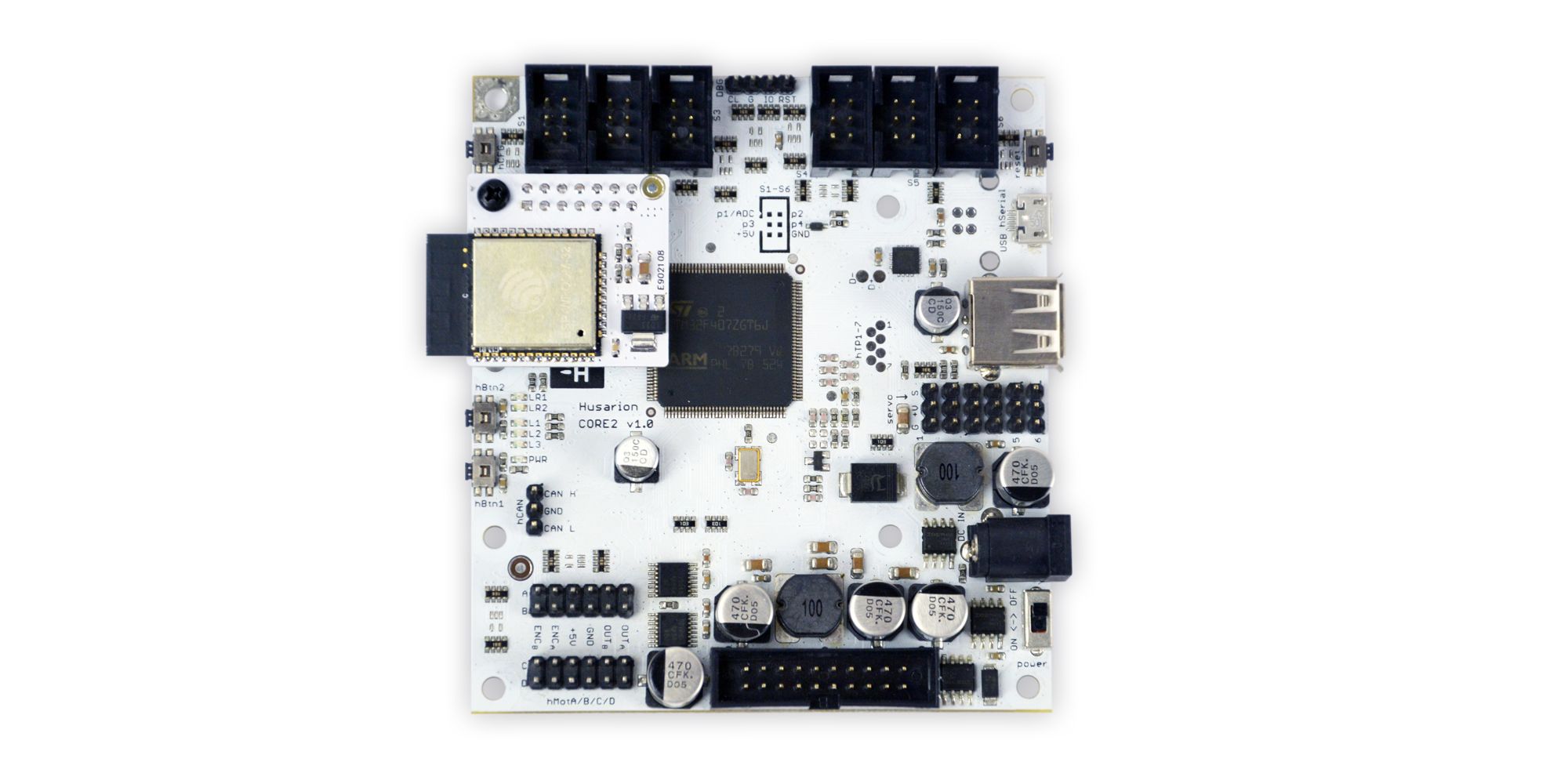
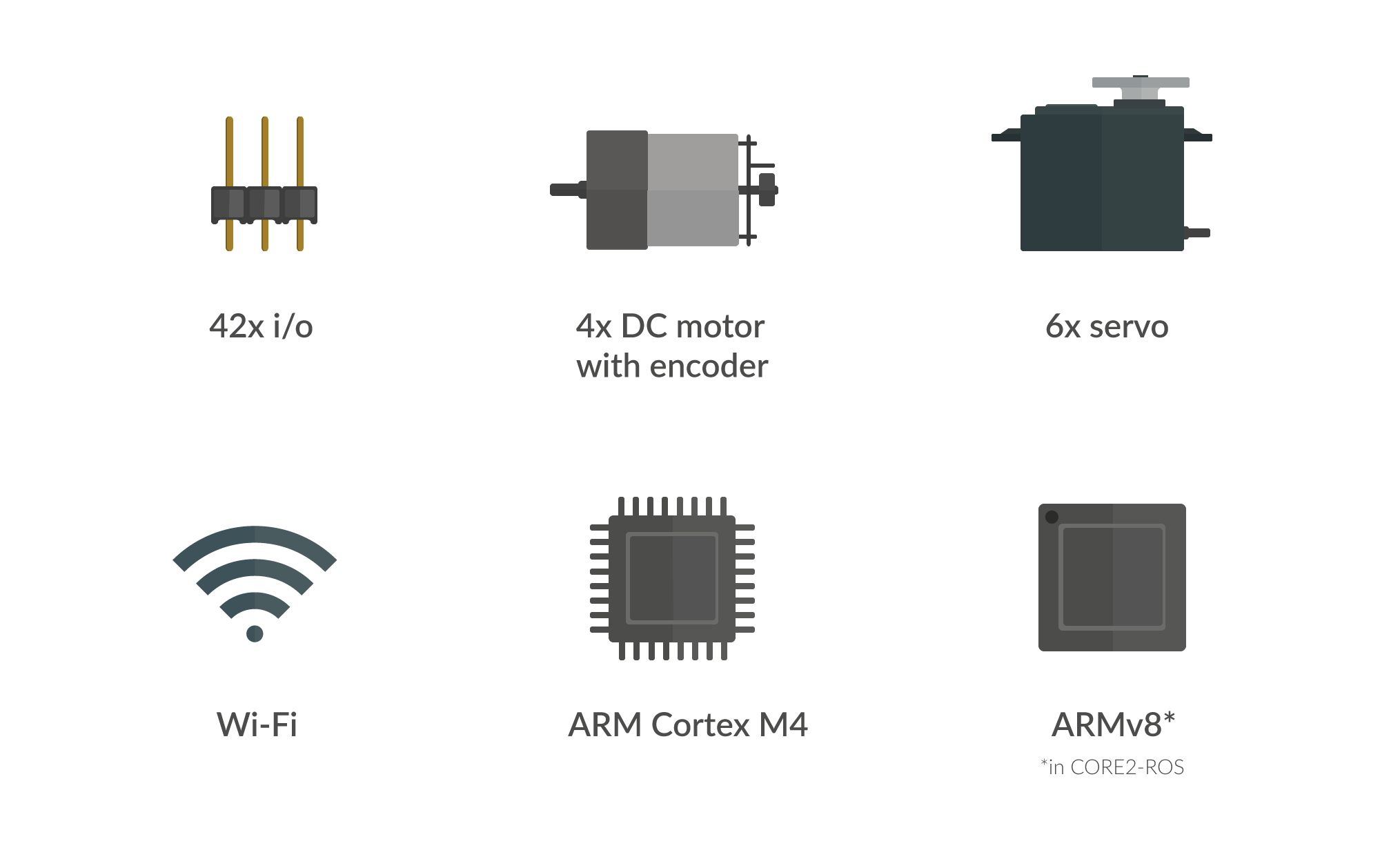
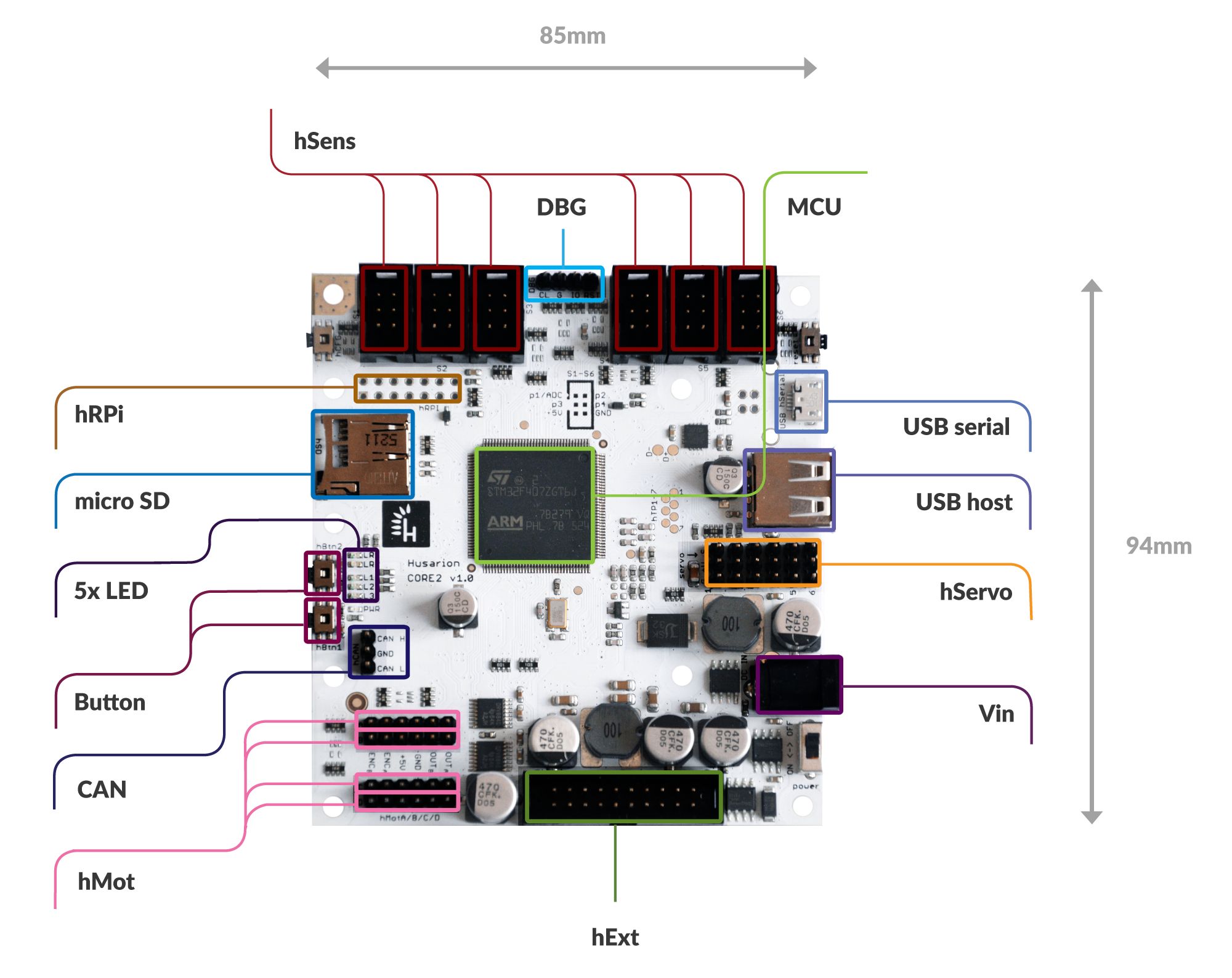
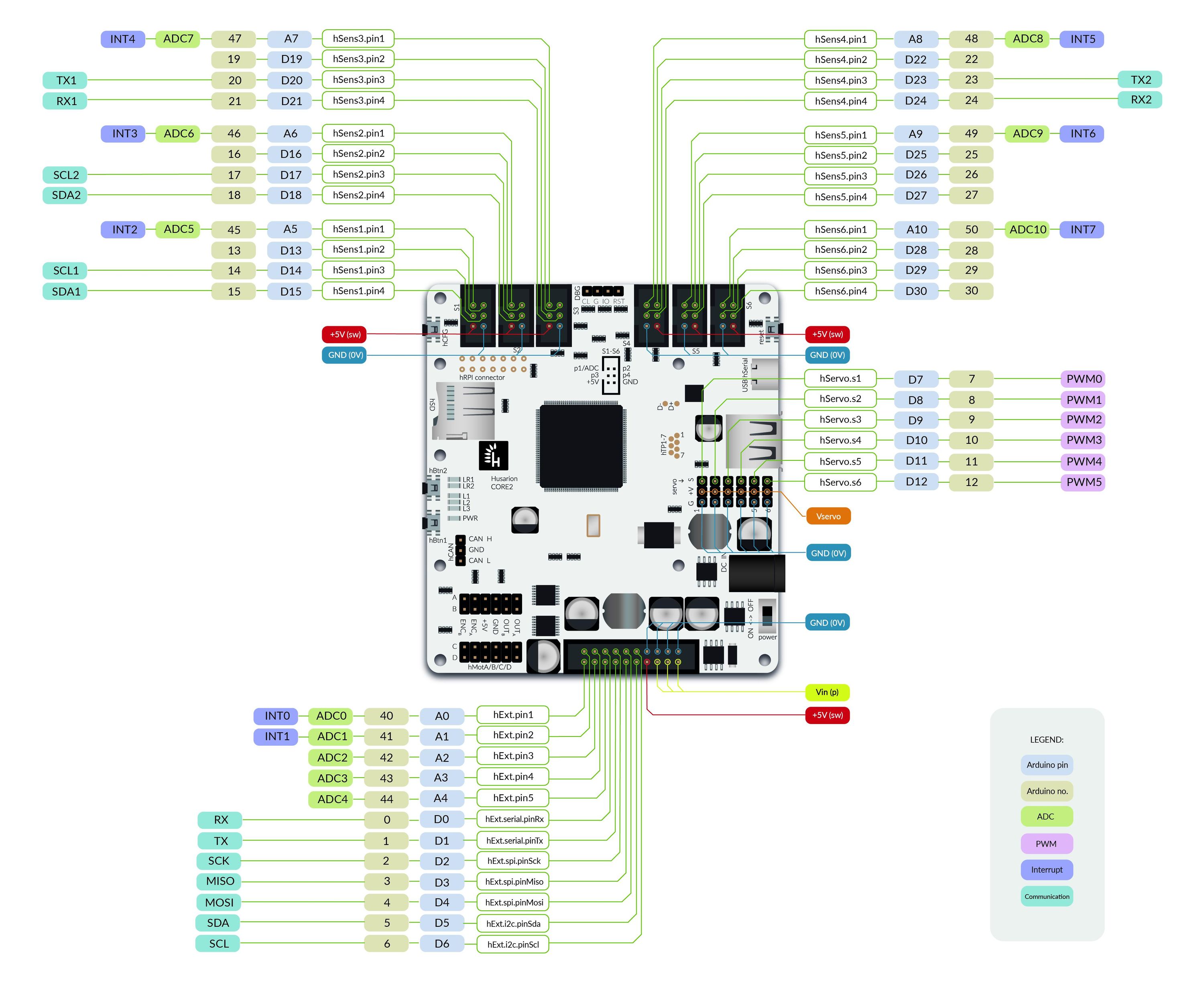
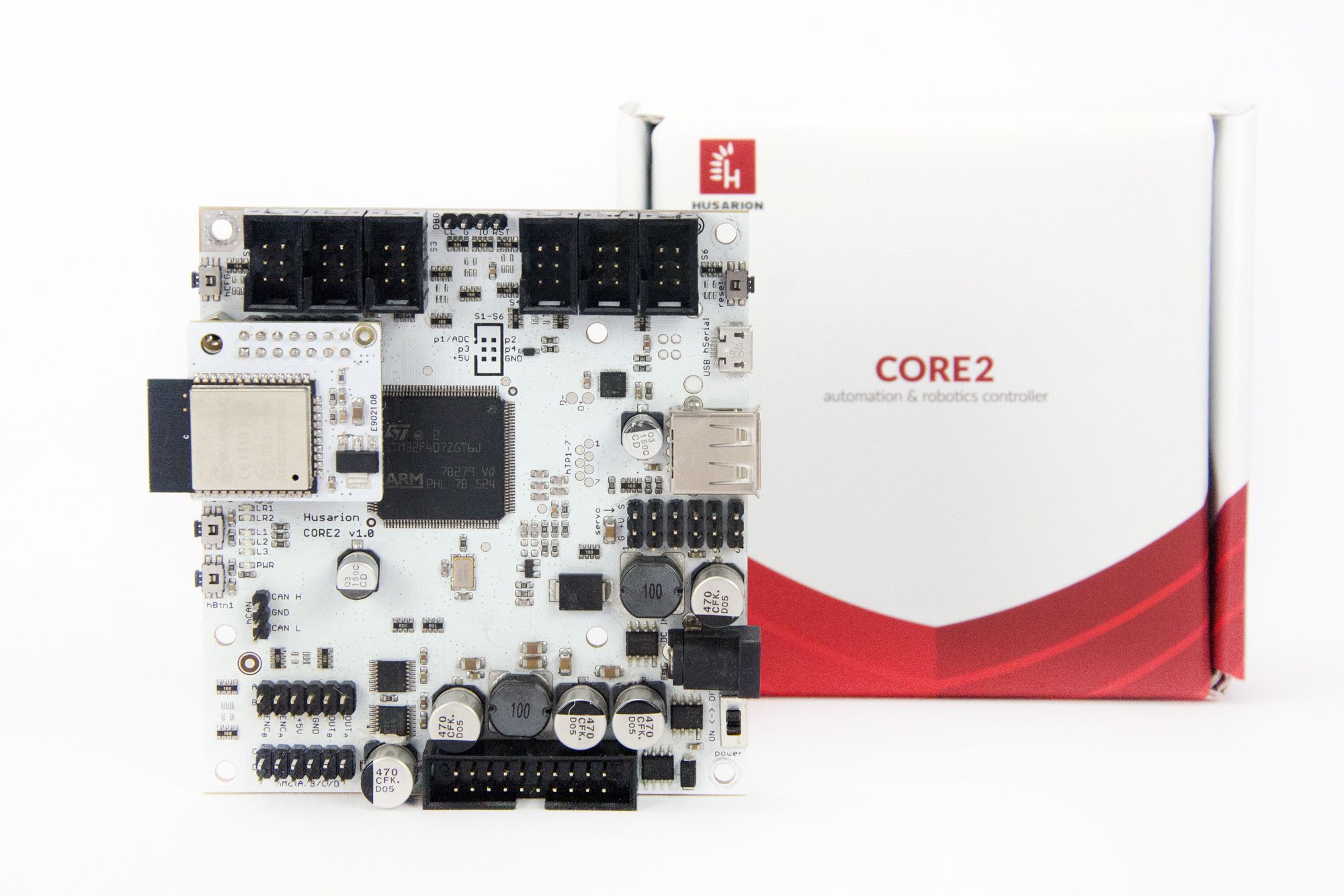
CORE2 contains popular interfaces for robotic projects, so you can build different robots easily without dozens of shields. Built-in DC motor ports allows you to directly connect up to four motors and process signals from their quadrature encoders in hardware - you don’t waste a CPU processing cycles, because a dedicated timer, one for each encoder, cares to not miss any single “tick”. Powerful libraries for CORE2 use all peripherals and CPU power in efficient way, thanks to a real-time operating system, DMA channels, interrupts - but everything is hidden behind an easy to use API. Interfaces for six servos and an on-board DC/DC converter allows you to select a voltage level for each servo. Lots of GPIOs, communication interfaces, ADC channels, and interrupt pins allow you to connect literally any sensor you can find, especially since CORE2 works with Arduino libraries, as you will see later.
| Label | Description |
|---|---|
| MCU | Real time microcontroller: STM32F4, ARM CORTEX-M4, 168 MHz, 192 kB RAM, 1 MB Flash |
| hRPi | Expansion port used for add-ons (included in each kit): |
| CORE2-ROS: a single board computer Raspberry Pi 3 (ARMv8, 1.2GHz, 1GB RAM, 16GB Flash) or ASUS Tinker Board (ARMv7-A, 1.8GHz, 2GB RAM, 16GB Flash) | |
| CORE2: an ESP32 based Wi-Fi module | |
| hMot | 4 quadrature encoder inputs + 4 DC motor outputs with built-in H-bridges (1 A cont./ 2 A max. current per output, 2 A/4 A current when paralleled) |
| hServo | 6 servo ports with selectable supply voltage (5 / 6 / 7.4 / 8.6 V) 3 A cont./4.5 A max. current for all servos together |
| hSens | 6 sensor ports (4 x GPIO, ADC/ext. interrupt, I2C/UART, 5 V out) |
| hExt | Extension port (12 x GPIO, 7 x ADC, SPI, I2C, UART, 2 x ext. interrupt) |
| USB serial | USB serial port through FTDI chip |
| USB host | USB host with 1 A charging capability |
| micro SD | Micro SD card slot |
| CAN | CAN interface with onboard transceiver |
| DBG | SWD (Serial Wire Debug) - STM32F4 debug port |
| Vin | Supply voltage input: 6 - 16V DC (with built-in overcurrent, overvoltage, and reverse polarity protection) |
Whether your next robotic idea is a tiny rover that penetrates tunnels, a surveillance drone, or a room-sized 3D printer, the CORE2 can serve as the brains behind it.
CORE2 will accelerate building a large variety of robots in all sorts of appliances. Need further inspirations? How about:
And we’re sure that you’re already imagining even cooler use cases!
A set of libraries for robots has been in development at Husarion for four years now. They are written to save computing power of CPU and perform low-level real-time functions of robot efficiently. These libraries, named “hFramework”, are based on a real time operating system (RTOS) and use DMA channels and interrupts internally to handle communication interfaces. Need a new PID regulator for your motor working on a separate task in real time? It’s only a few lines of code. We believe in the power of hFramework and we’ve made it open-source: hFramework on GitHub

ROS is a great set of tools for building autonomous robots. It’s becoming a standard for new robotic designs. CORE2-ROS controller integrates a dedicated Linux image with ready-to-use ROS packets and libraries that will help you to benefit from the synergy of low-level, real-time tasks realized by CORE2 and high-level tasks realized in a single board computer. Along with CORE-ROS, we’ve prepared a set of tutorials to help you get started with ROS and CORE2. Currently covered topics include:
All topics can be covered using ROSbot - autonomous robot mobile platform with CORE2-ROS.
There is no easier way to start building your own ROS powered robots!
CORE2 works with Arduino libraries! There are Arduino libs for literally any sensor available on the market. You can find them easily on the web and use them directly with CORE2 controller, without having to modify them to work. The Arduino compatibility layer uses the hFramework API, so CORE2 peripherals are used in a very efficient way.
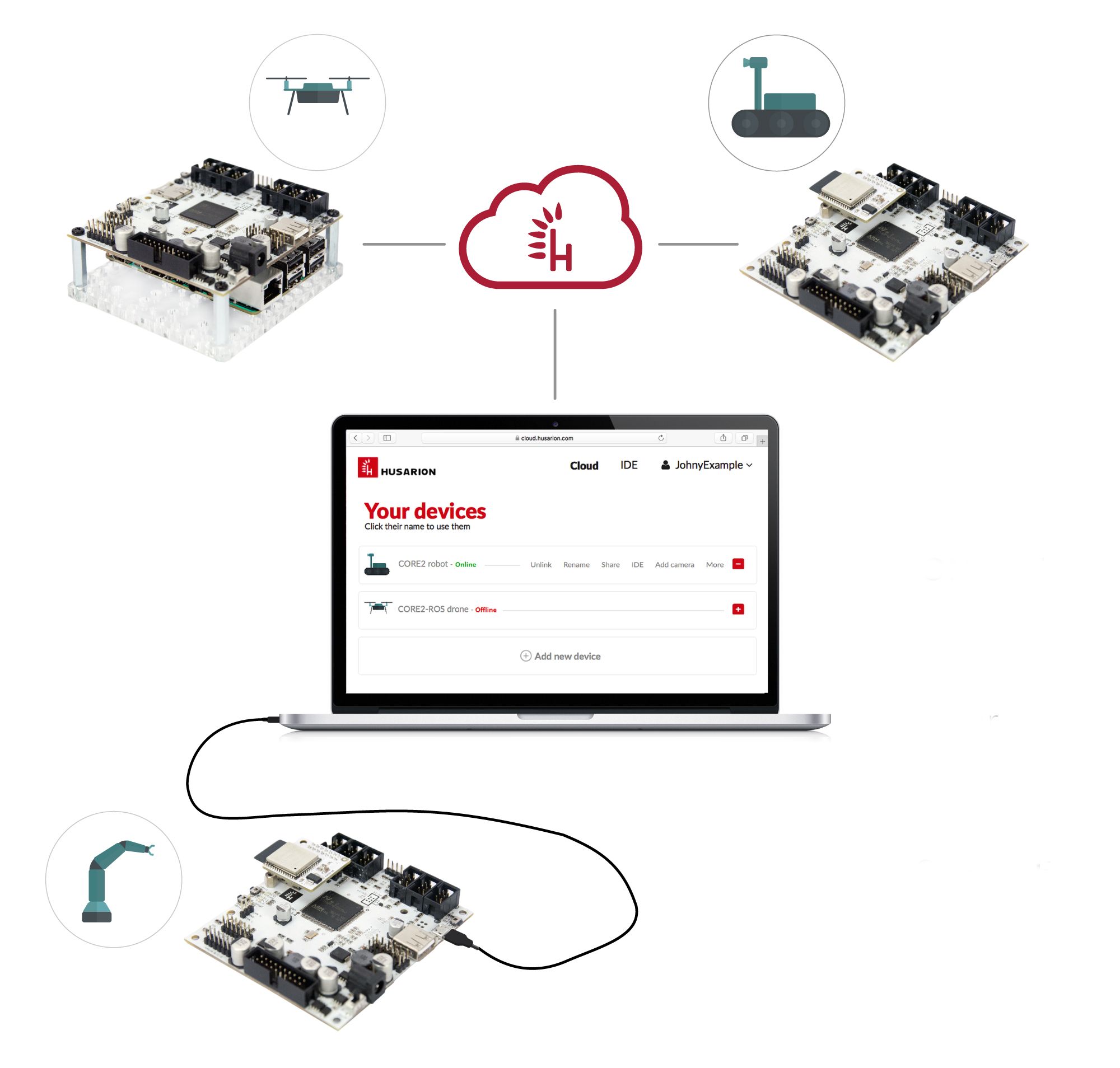
It’s a command center for all your Husarion powered robots. With our Cloud you can:
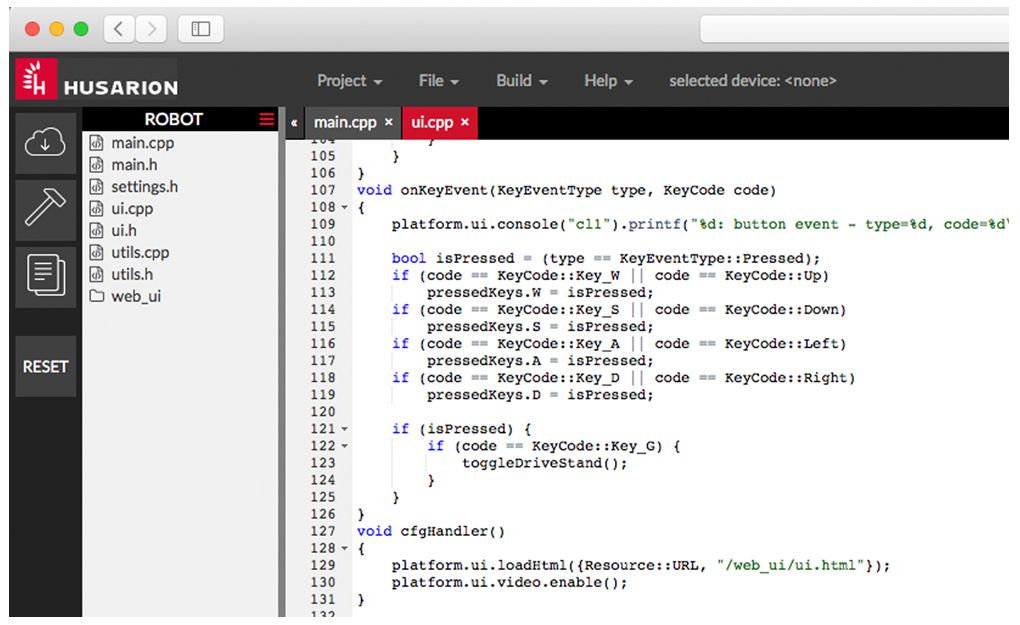
Create the WebUI - a dedicated user interface to allow controlling your robot in real time and streaming the video - thanks to HTML5, CSS and built-in WebRTC support.


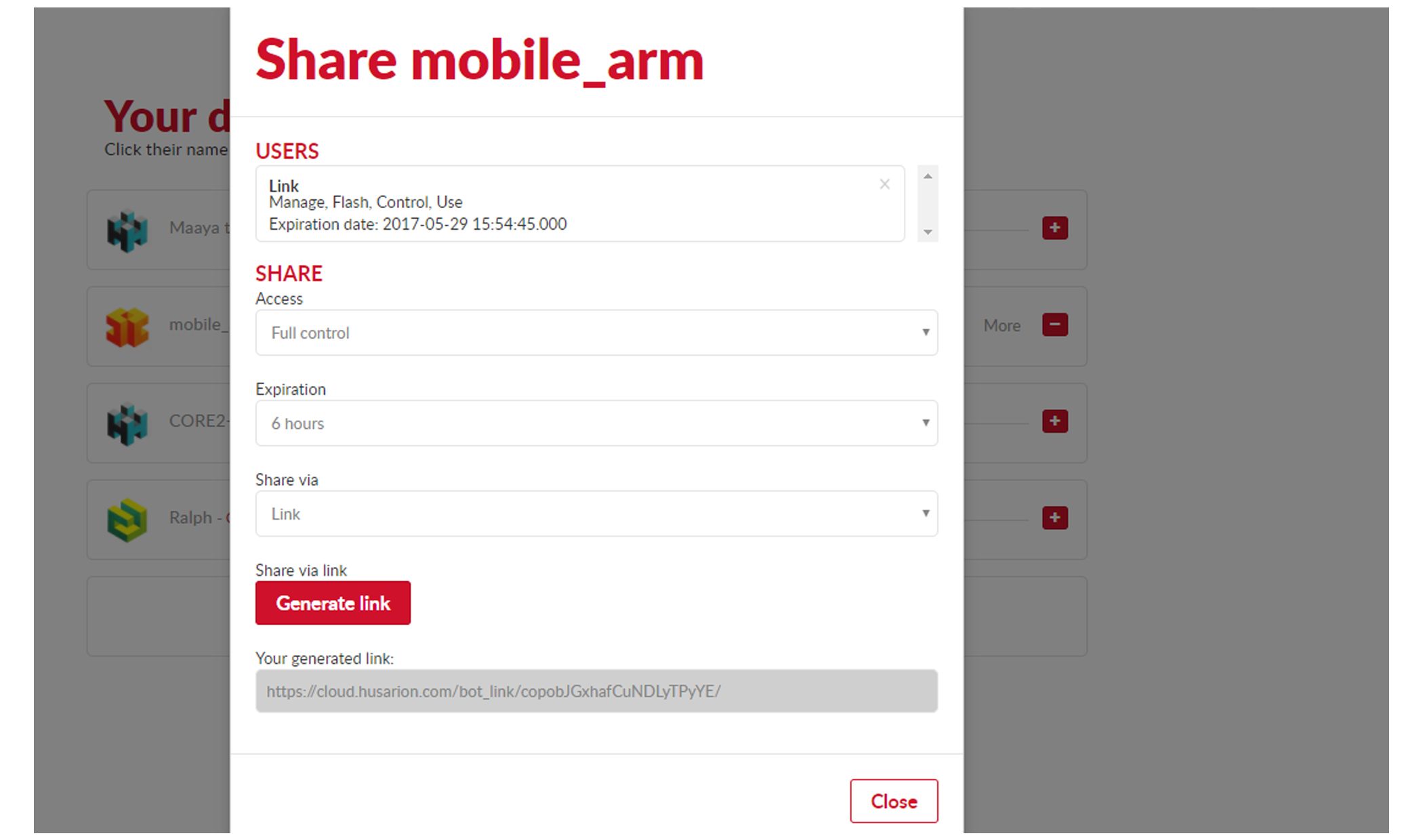
Share your robot with different access rights and generate a link to your robot anybody can open.
Develop robot firmware and program robots through a web interface.
Feel safe thanks to a full SSL connection between CORE2 and cloud. Access your robots from a 3rd party apps with a cloud API.

Husarion provides both a cloud-based WebIDE and an offline SDK.
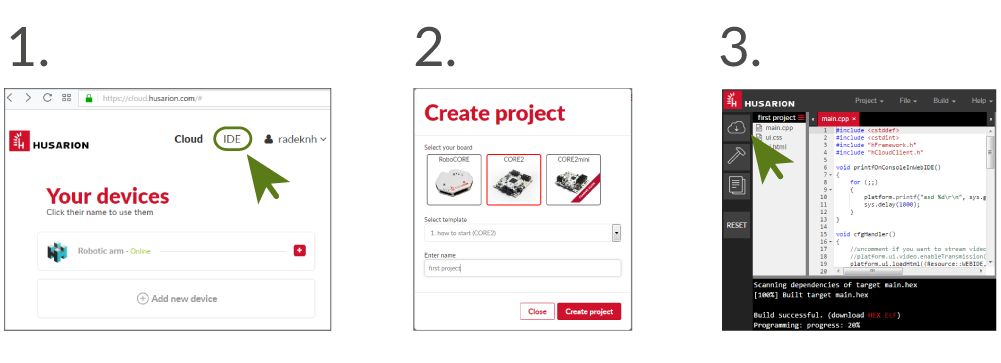
Want to program your CORE2 two minutes after unboxing? Just connect CORE2 to your account at cloud.husarion.com, open Web IDE, and select one of available examples. Then click the “program” button: your code will be built on our servers and then uploaded over the internet to your CORE2. Nothing simpler!
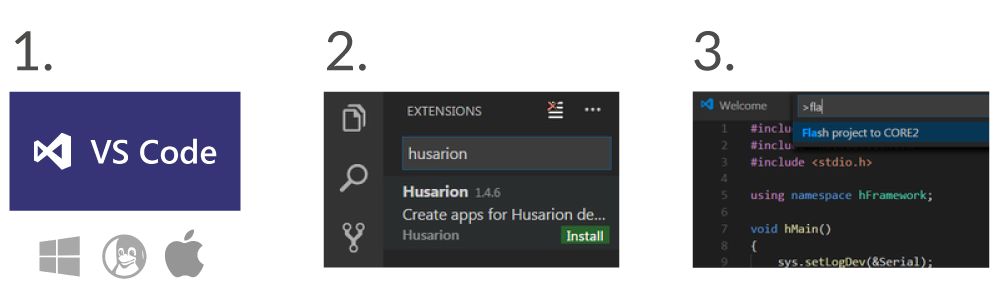
Configure your favourite IDE with our SDK or install the Husarion extension in your Visual Studio code. It automatically downloads the SDK and toolchain and configures your IDE.
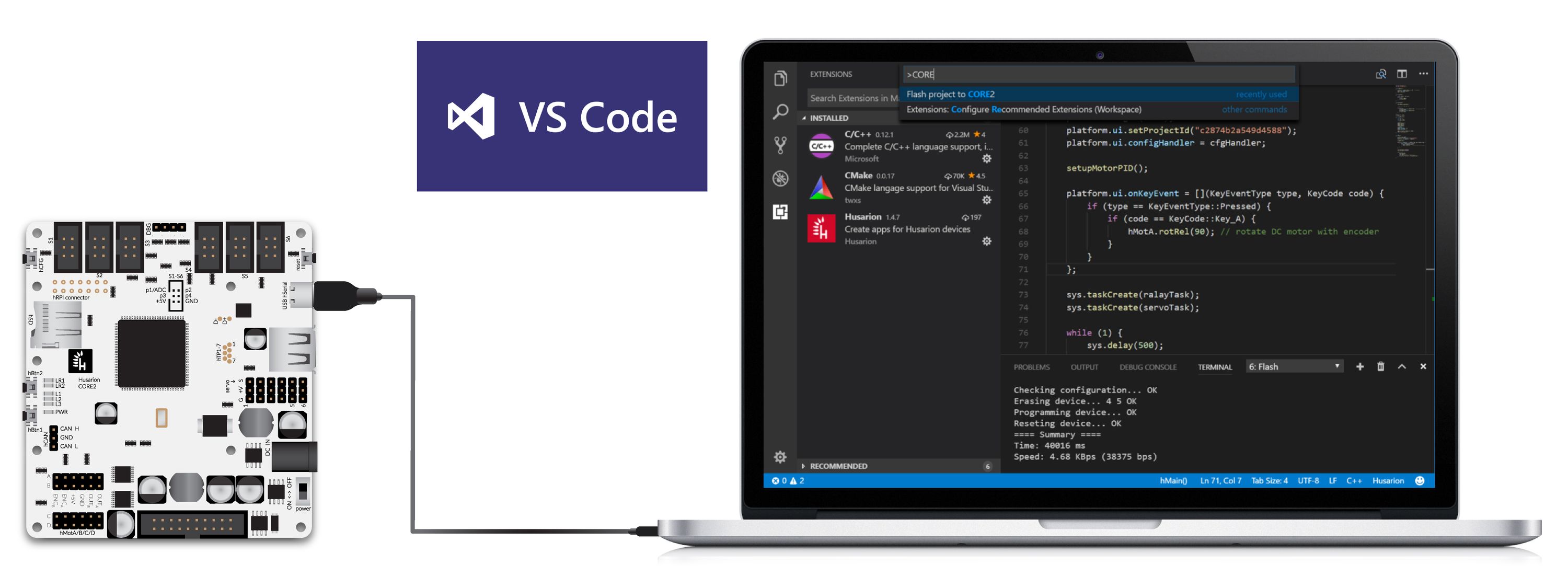
No cloud building - code is built locally on your computer and downloaded via USB cable. And it works on Linux, Mac and Windows.
CORE2 is the most versatile robot-building platform available on the market. It’s not only affordable, but also powerful:
| CORE2 | CORE2-ROS | BeagleBone blue | Erle-Brain 3 | LEGO Mindstorms EV3 | |
|---|---|---|---|---|---|
| Real-time microcontroller | ARM Cortex-M4 @168MHz 192KB RAM 1MB Flash | ARM Cortex-M4 @168MHz 192KB RAM 1MB Flash | ARM Cortex-M3 @200MHz RAM & Flash shared with board computer | ||
| Board computer | ARMv7-A @1.8GHz 2GB RAM 16GB Flash (microSD) (ASUS Tinker Board) | ARM Cortex-A8 @1.2GHz 512MB RAM 4GB on-board Flash + microSD | ARM-8 @1.2 GHz 1GB RAM microSD (Raspberry Pi 3) | ARM-9 @300MHz 64MB RAM 16MB on-board Flash + microSD | |
| Wireless | Wi-fi, Bluetooth \ (ESP32) | Wi-Fi, Bluetooth | Wi-Fi, Bluetooth | Wi-Fi, Bluetooth | Wi-Fi, Bluetooth |
| Servo | 6x out with selectable voltage level (5/6/7.4/8.6 V) | 6x out with selectable voltage level (5/6/7.4/8.6 V) | 8x out (6 V) | 12 x out (5 V) | |
| DC motor output | 4 | 4 | 4 | 4 | |
| Quadrature encoder input | 4 | 4 | 4 | 4 | |
| GPIO | 42 | 42 | 8 | 16 | |
| UART | 4 | 4 | 5 | 1 | 4 |
| SPI | 1 | 1 | 1 | ||
| I2C | 3 | 3 | 1 | 2 | 4 (emulated by software) |
| CAN | 1 | 1 | |||
| External ADC input | 13 | 13 | 4 | 0 | 4 |
| External interrupt input | 8 | 8 | (no data) | 0 | 0 |
| On-board sensors | IMU, barometer | IMU, barometer, temperature | |||
| Price (USD) | 89 | 159 | 89 | 210 | 190 |
Compare CORE2 to a controller without real-time processing:
Here’re a couple of example prototypes we’ve made using the power of CORE2 and the Husarion platform:

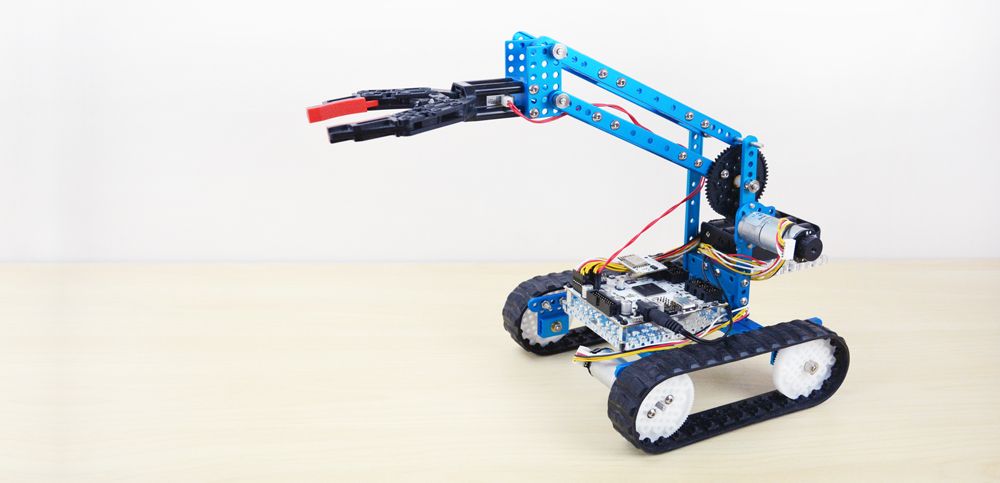
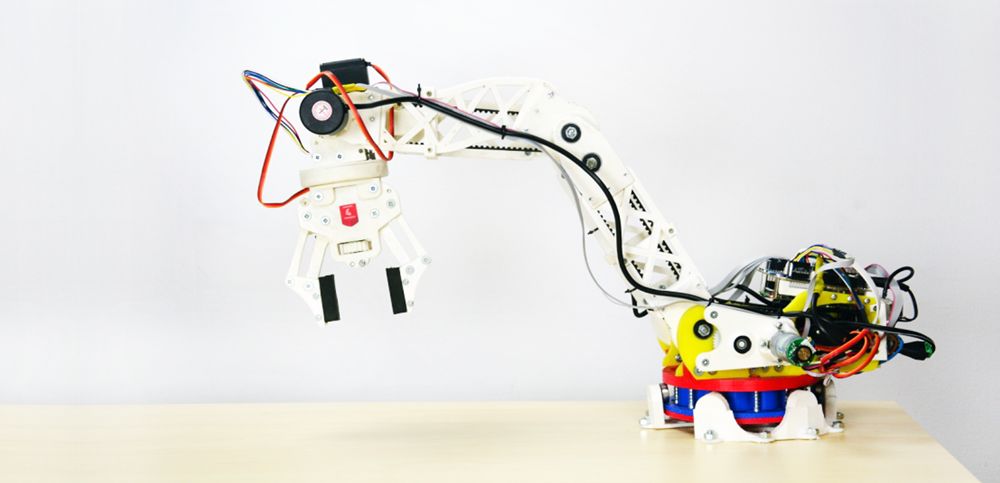
You’ve got endless possibilities. Some inspirations for your own projects you can find on Husarion profile at hackster.io
If you don’t want to deal with your own mechanics and don’t have LEGO® Mindstorms or Makeblock sets, the ROSbot and telepresence kits will help you start with a ready-to-use robot in minutes after unboxing.
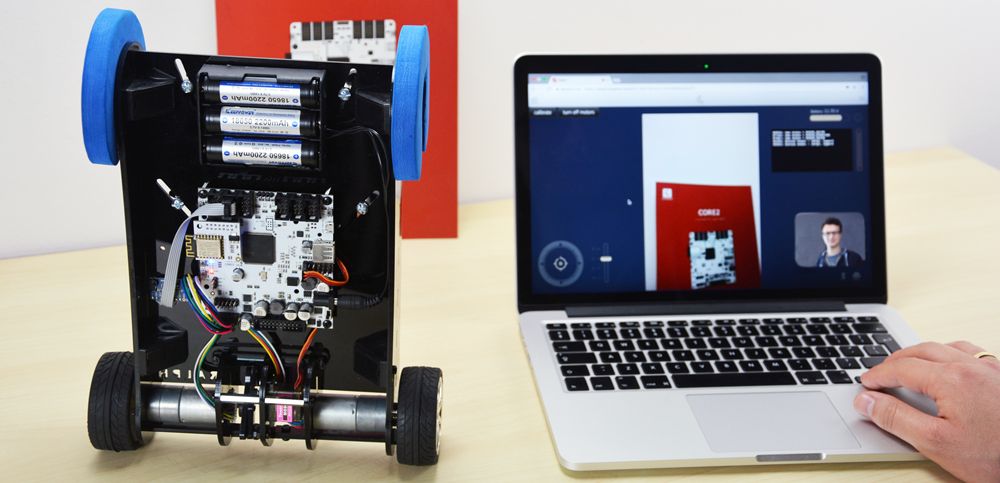
CORE2 Telepresence Robot - build your own first-person view robot (self-balancing, thanks to encoders, gyro and accelerometer)! Control it from a web browser, customize its UI or even share with a friend (if you feel like hosting a virtual guest). The kit contains:
Mechanics are already assembled. The only thing you need to do is attach CORE2 and connect your own tablet with hVideo app.
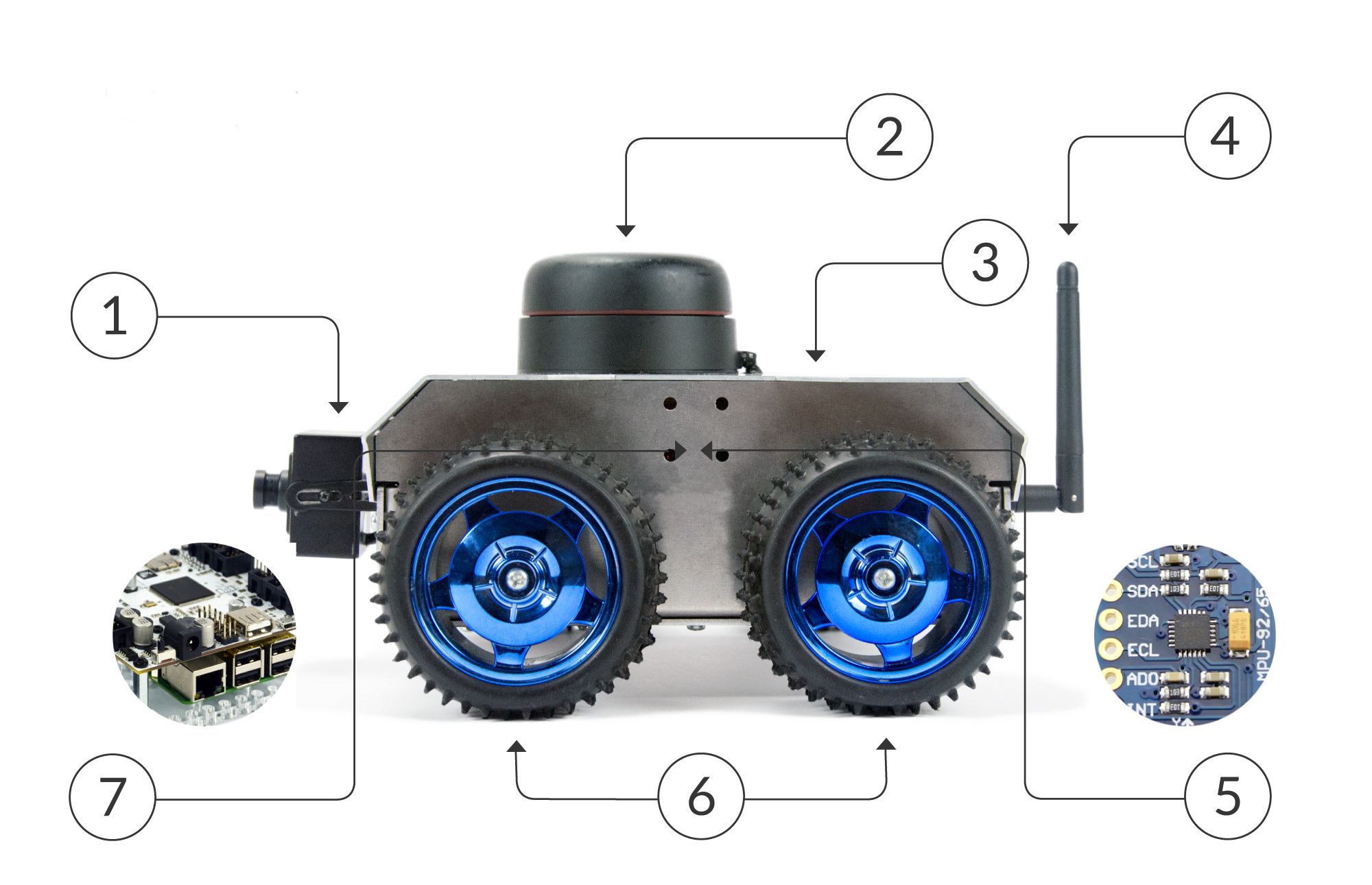
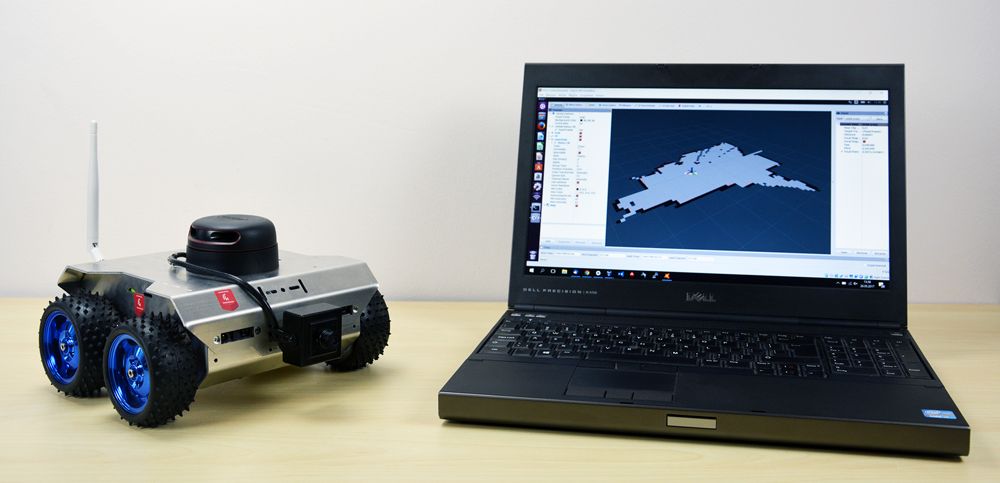
ROSbot is an open source, mobile robot platform containing:
Our ROS tutorial is based on this platform. This is the easiest way to start building your own autonomous mobile robots. Mechanics are assembled and ready to use.
We have prepared some add-ons for CORE2/CORE2-ROS:
CORE2brick - connects CORE2 or CORE2-ROS with LEGO® Mindstorms.
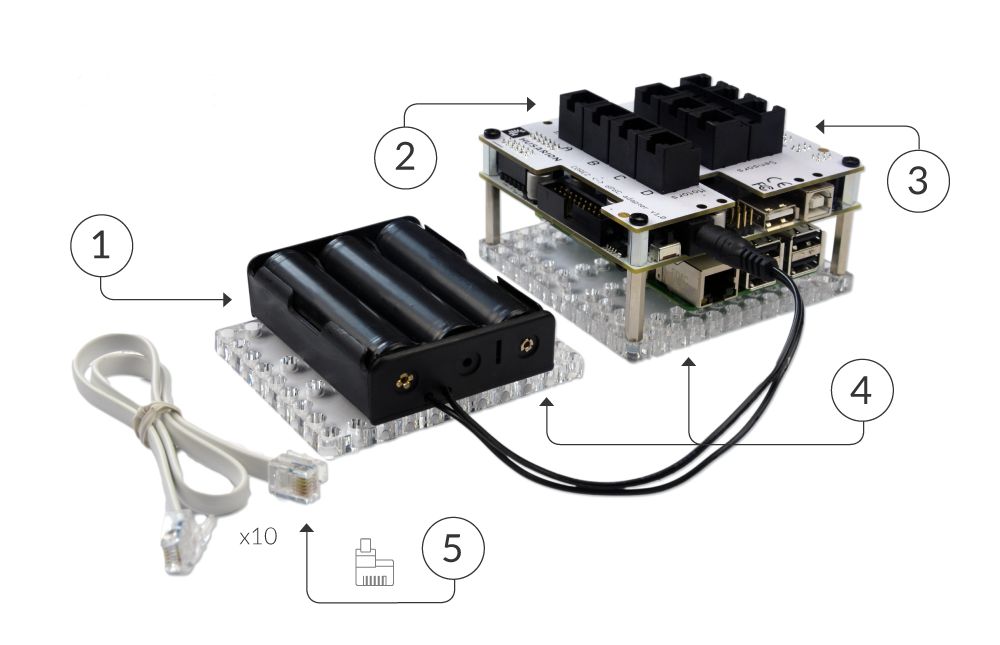
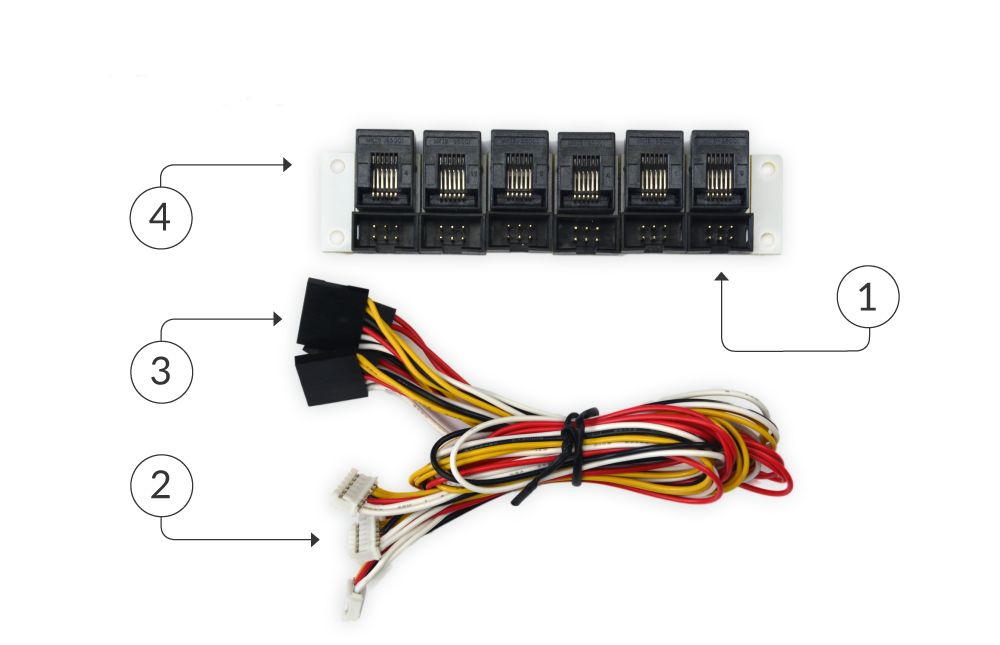
CORE2 + CORE2brick is a perfect match for all robotics beginners starting with Mindstorms as well as academics, to a provide closer-to-business platform for educating students. The central component is the shield that provides full compatibility with LEGO® Mindstorms sensors and motors, including current sources and UART or I2C interfaces. The kit also contains cables, battery pack and all mechanical elements needed to connect CORE2 with bricks. CORE2-ROS shown under CORE2brick shield is not included in this add-on.
CORE2block - connects CORE2 or CORE2-ROS with Makeblock system. The metal, screwed mechanicals of Makeblock gives you more robust mechanics than LEGO® bricks.
The main components are adapters for sensors and motors. The electrical interface of Makeblock sensors is similar to CORE2 hSensor, but some pin-swapping is needed, so these adapters do that job.
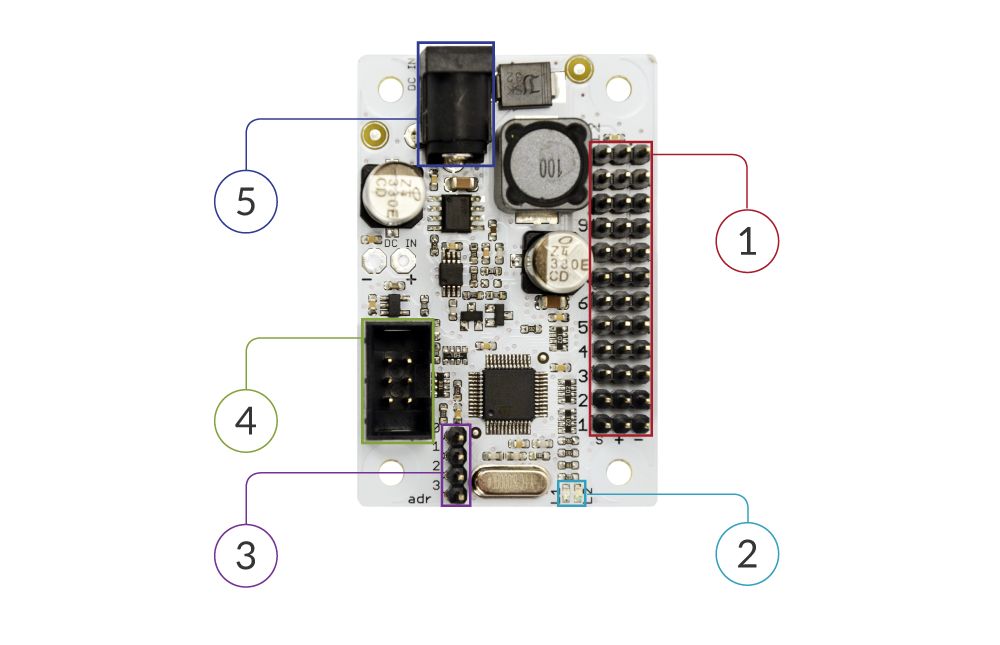
Servo controller - allows to connect 12 additional servos to CORE2.
Communicates with CORE2 via hSensor interface. Up to four servo controllers can work on one hSensor port thanks to 2-bit addressing. The step down DC/DC converter with software-controlled output voltage is available on board to simplify power connections - you can supply the servo controller and CORE2 from the same power source.
The CORE2 is not our first robotic controller. We’ve been making them for over four years now, and we shipped the crowdfunded RoboCORE as our first product. The CORE2 is a result of our continued iteration and experience, and incorporates a lot of know-how we’ve acquired throughout our journey.
Now we have a final design ready, with complete BOMs fully specified. We’ve negotiated with vendors and distributors and currently all parts are available with a maximum one month lead time. Depending on pre-ordered volumes during the Crowd Supply campaign, we will choose a right contract manufacturer. They can organize all production and start immediately after the supply chain process finishes.
Our priority will be to minimize the time to ship orders to you. We set the shipping dates with safe margins. Having worked with multiple fulfillment centers in the past, we will pick the best, proven ones that will ensure a smooth ordering experience for you.
There is always some risk related to producing hardware in volume, like natural disasters, supply chains problems, and quality assurance. But we’ve done everything possible to reduce risk to a minimum before launching our Crowd Supply campaign. CORE2 is the second generation of our computer for robots that we will send to clients, so we have a lot of experience that helps us to avoid potential problems. CORE2 hardware is tested by our team and beta-testers, and is ready for a mass production. We prepared the Automatic Test Equipment (ATE), that allows us to test and program initial firmware for CORE2 and CORE2-ROS in a short time without a risk of human error.
A development of stable software also takes a lot of time, but everything that we have prepared for CORE2 — libraries, packets, extensions, mobile apps, and cloud platform — has been tested and works stably.The software has already been used by clients around the world.
We also have experience in working with fulfillment companies that helped us before in shipping our products worldwide. Supply chains issues, quality assurance and other potential problems shouldn’t cause a major delay. Nevertheless, we will inform you about any issues, will keep you updated on the campaign, and and will be responsive to your questions. We will challenge every potential issue to bring you quality product within short time.
A: Yes, all rewards prepared for this campaign will be available to buy - sooner or later after the campaign. If you need something particular or ASAP - please contact us.

Produced by Husarion in San Francisco, USA.
Sold and shipped by Crowd Supply.

CORE2 controller + wireless module with ESP32 + lifetime access to Husarion Cloud.

CORE2 controller + Raspberry Pi 3 / ASUS Tinker Board + acrylic glass bottom plate + microSD card with our Linux image with ROS + standoffs and screws + lifetime access to Husarion Cloud. If you have your own Single Board Computer, choose “without SBC” and you will receive the kit prepared to assemble your computer.

Adapter that allows connecting CORE2 or CORE2-ROS with LEGO® Mindstorms. Includes ten cables (4x20 cm, 4x35 cm, 2x50 cm) to connect LEGO® sensors and motors, 2 acrylic plates with holes for LEGO® bricks, stand-offs and screws required to connect everything together.

Adapter that allows connecting CORE2 or CORE2-ROS with Makeblock mechanical parts. Includes the necessary connector adapters to connect Makeblock sensors and motors, two acrylic plates with holes for Makeblock parts, stand-offs and screws required to connect everything together.

A complete kit to build your own telepresence robot in minutes. It includes a CORE2 controller (with ESP32), two DC motors with encoders and wheels, one servo motor, an MPU-9250 inertial measurement unit (IMU), and an acrylic chassis with an adjustable holder for a small tablet (not included).

Assembled robot with all the stuff you need to learn and develop ROS projects. Includes: CORE2-ROS controller with ASUS Tinker Board, 4x DC motor with encoders and wheels, metal chassis, battery pack for 18650 batteries, camera, RPLIDAR A2 360°, IMU (MPU-9250), four distance sensors from Sharp

A module for CORE2 that allows you to connect 12 additional RC servos. It communicates with CORE2 using hSensor interface. Maximum of four servo controllers can be connected to one hSensor port - which means you can control up to 102 servos from one CORE2.

We create the easy-to-use hardware, software, and cloud tools you need to prototype and manufacture robots and manage them in the field.

An open, Arduino-compatible, 3.8-inch e-paper device with plenty of peripherals
A long, lean, delicious development board with a unique form factor and high-quality components
An MCU + eFPGA dev kit with 100% vendor-supported open source tools that fits inside your USB port