The IQ Motor Module is an integrated motor and controller with an embedded position sensor. With position sensing and advanced calibration and control algorithms, IQ is able to optimize motor performance and give users unprecedented control over their vehicles and machines. The drone industry has relied on hobby-grade motors and controllers for too long. Now, IQ is bringing advanced motor control to the drone industry and other robotics fields at an affordable price.
IQ motors support serial communication as well as standard hobby protocols, so you can easily integrate them into your vehicle. Whether you’re an engineer testing our motors for commercial use or a maker/pilot using them in a personal drone, IQ motors will deliver high-end, professional performance.

The IQ Vertiq 2306 2200KV is ideal for FPV pilots who want faster throttle response, greater maneuverability, and higher peak RPM. Check out some demos.
High efficiency motors are even more important in VTOL applications. The Vertiq 2306 2200KV is much more efficient relative to standard motor/ESC combinations at lower speeds.
Freed from the limitation of spinning in a single direction, IQ motors enable entirely new drone technology. We’re excited to see what our backers come up with.
Although our high speed motors and controllers are designed for multicopters, they’re great for anything from RC planes to cars to battlebots.
An IQ Vertiq 2306 220KV motor can be used to actuate movement at every joint, giving a robot arm smooth, precise motion.
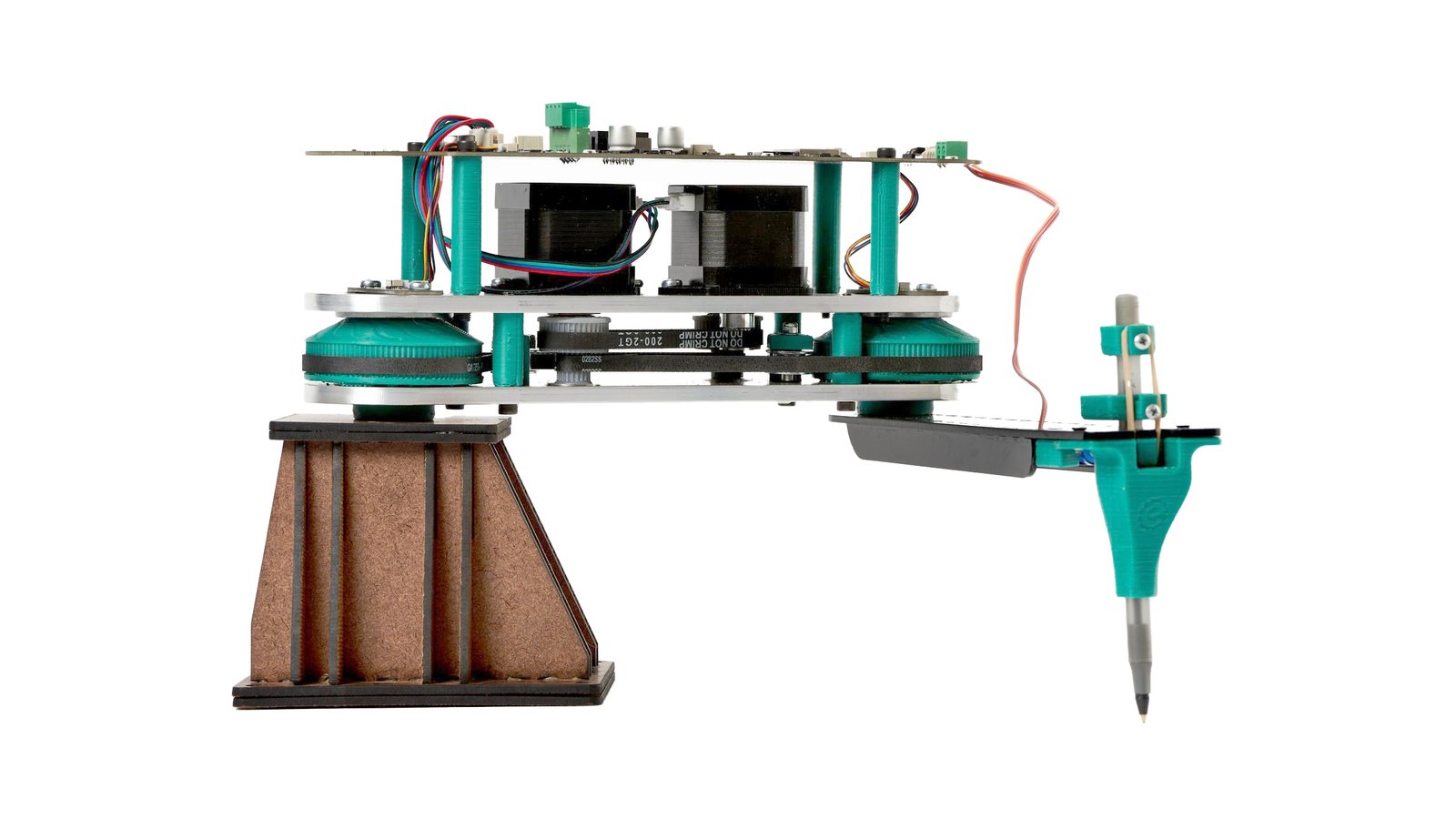
Our tech is great for linear motion machines. IQ motors are smoother, quieter, and more efficient than stepper motors, and they will never skip a step or get lost.
Closed-loop position control and anti-cogged motion can make gimbal systems extremely smooth and stable.
High speed, precision motors and controllers can cost thousands of dollars. Try our motors in your prototype to save money without sacrificing performance. We’re planning to make industrial and medical-grade motors soon.
Since our motors are easily programmable and versatile, they can be used in so many different applications we can’t possibly imagine them all. We can’t wait to see what our backers dream up.
| Microcontroller | 32-bit ARM Cortex MCU @ 64 MHz |
| Motor Dimensions | 28.4 mm diameter, 22 mm height |
| Stator Dimensions | 23 mm diameter, 6 mm height |
| Shaft Diameter | 2 mm ID, 5 mm OD, 5 mm prop |
| Weight (motor w/o wires) | 35.2 g |
| Weight (motor w/ wires+connectors) | 43.1 g |
| Weight (prop adapter+nut) | 2.6 g |
| Motor KV Options | 2200 RPM/V, 220 RPM/V |
| 2200 KV Max Continuous Motor Current (10 s) | 30 A |
| 2200 KV Max Instant Motor Current (50 ms) | 60 A |
| 220 KV Max Continuous Motor Current (10 s) | 3 A |
| 220 KV Max Instant Motor Current (50 ms) | 6 A |
| Voltage (Max # of Lipo Cells) | 17 V (4S) |
The preliminary Speed Module datasheet is available here.
The speed firmware is specially designed to drive propellers or any application with target velocities. This firmware speaks all of the common communication protocols, including 1-2 ms PWM, Oneshot (125, 42), Multishot, and DShot(150, 300, 600, 1200), as well as IQ’s UART protocol.
The position firmware has a position controller capable of single turn positioning and multi turn positioning. The built in minimum jerk trajectory generator creates smooth motion with minimal user effort. It speaks step/direction and IQ’s UART protocol.
Note: We will make both the position and speed firmware available, so users will be able to flash the controllers with the other firmware if they choose. We will do an update explaining how to switch firmwares if you’d like the position firmware on an IQ Speed Module or vice versa.
| Specifications | IQ Motor Modules | Drone Setup #1 | Drone Setup #2 | Drone Setup #3 |
|---|---|---|---|---|
| Motor | Integrated | Tiger Motor F40III - 2400KV | Turnigy D2206-2300KV 31g Brushless Motor CW | ZTW Black Widow 2206 2200KV With Built-In ESC CW |
| Electronic Speed Control (ESC) | Integrated | 32A Kiss ESC | Turnigy MultiStar 30A BLHeli-S Rev16 V3 ESC 2~4S (Opto) | Integrated |
| Motor Dimensions (Dia/Height) (LxWxD) (mm) | 28.4/22 | 28.4/17 | 28/19.5 | 27.5/21.4 |
| ESC Dimensions (Lenth/Width) (mm) | Integrated | 27/19 | 28/13 | Integrated |
| Weight RTF¹ / RTU (g) | 45.7 | 46.6 | 41.2 | 41.6 |
| Motor KV (final drive) (RPM/V) | 2200 & 220 | 2400 | 2300 | 2200 |
| Shaft Diameter (ID/OD/prop) (mm) | 2/5/2005 | 1.6/4/5 | -/3/5 | -/3/5 |
| Voltage (V) / No. of Lipo Cells (S) | 16.8/4 | 30/6 | 16.8/4 | 12.6/3 |
| Max Speed (no load) (RPM) | 37000 & 3700 | 71000 | 39000 | 28000 |
| Min Speed (RPM) | 0 | ~1000 | ~1000 | ~1000 |
| Gearbox | No | No | No | No |
| Torque (stalled, continuous) (Nm) | 0.04 | N/A | N/A | N/A |
| Max Current Continuous (A) | 30 & 3 | 32 | 30 | 18 |
| Max Current Burst (A) | 60 & 6 | 45 | 35 | 28 |
| Reversibility (3D mode) | Yes | Yes² | No | No |
| Open-loop velocity control | Yes (Voltage/PWM) | Yes (PWM) | Yes (PWM) | Yes (PWM) |
| Closed-loop velocity control | Yes (PID+FF) | No | No | No |
| Backdrivable | Yes | N/A | N/A | N/A |
| Regenerative and active braking | Yes | Yes | Yes | No |
| Active freewheeling | Yes | Yes | Yes | No |
| Over-current protection | Yes | Yes | No | No |
| Built-in Controller/ESC | Yes | No | No | Yes |
| Sinusoidal (vibrationless) | Yes | Yes (<90% throttle) | No | No |
| Price (qty. 1) (USD) | 80 | 54.89 | 18.05 | 28.63 |
¹ With 150 mm wires, XT-30 power connector, servo connector
² Startup jitter on direction change
| Specifications | IQ Motor Modules | Position Setup #1 | Position Setup #2 | Position Setup #3 |
|---|---|---|---|---|
| Motor | Integrated | Nema 11 11HS12-0956D | Power HD 3001HB | Dynamixel AX-18A |
| Driver | Integrated | TB6612 Stepper Motor Driver Breakout | Integrated | Integrated |
| Controller | Integrated | Arduino Pro Mini 328 | Integrated | Integrated |
| Motor Dimensions (Dia/Height) (LxWxD) (mm) | 28.4/22 | 28.2x28.2x31.5 | 20.5x54.5x39.5 | 32x50x40 |
| ESC Dimensions (Lenth/Width) (mm) | Integrated | 27/19 + 33/18 | Integrated | Integrated |
| Weight RTF¹ / RTU (g) | 45.7 | >110 | 43 | 54.5 |
| Motor KV (final drive) (RPM/V) | 2200 & 220 | 211 | 14 | 8 |
| Shaft Diameter (ID/OD/prop) (mm) | 2/5/2005 | -/5/- | N/A | N/A |
| Voltage (V) / No. of Lipo Cells (S) | 16.8/4 | 13.5/3 | 6/- | 12.6/3 |
| Max Speed (no load) (RPM) | 37000 & 3700 | 2800 | 83 | 97 |
| Min Speed (RPM) | 0 | 0 | 0 | 0 |
| Gearbox | No | No | 240:1 | 254:1 |
| Torque (stalled, continuous) (Nm) | 0.04 | 0.04 | 0.43 | 1.8 |
| Max Current Continuous (A) | 30 & 3 | 1 | 0.9 | 2.2 |
| Max Current Burst (A) | 60 & 6 | N/A | N/A | N/A |
| Reversibility (3D mode) | Yes | Yes | Yes | Yes |
| Open-loop position control | Yes | Yes | No | No |
| Closed-loop position control | Yes | No | Yes (165°) | Yes (300°) |
| Closed-loop multi-turn position control | Yes | No | No | No |
| Trajectory generation | Yes | No | No | No |
| Backdrivable | Yes | Yes² | No | No |
| Regenerative and active braking | Yes | No | Yes | Yes |
| Active freewheeling | Yes | No | N/A | N/A |
| Over-current protection | Yes | Yes | No | Yes |
| Built-in Controller/ESC | Yes | No | Yes | Yes |
| Sinusoidal (vibrationless) | Yes | No | N/A | N/A |
| Price (qty. 1) (USD) | 80 | 29.53 | 9.95 | 94.9 |
¹ With 150 mm wires, XT-30 power connector, servo connector
² Position information will be lost
Crowd Supply will be handling all fulfillment and logistics. As such, all orders will be shipping from their warehouse in Texas, in the US. See The Crowd Supply Guide for more information on their ordering and shipping policies.


Produced by IQ Motion Control in Philadelphia, Pennsylvania.
Sold and shipped by Crowd Supply.

An IQ Motor Module pre-loaded with our speed control firmware (2200 KV). (Formerly named IQ Speed Module.)

An IQ Motor Module pre-loaded with our position control firmware (220 KV). (Formerly named IQ Position Module)

Born out of the University of Pennsylvania’s robotics lab, IQ Motion Control is a tech startup that delivers the ultimate drone motor module for versatility and performance.