robocore
Robotics & Motors
KiCad
link101
An open source multi-protocol bridge for ROS 2 robots
This project is launching soon.
0
updates
updates
robocore
Robotics & Motors
KiCad
This project is launching soon.
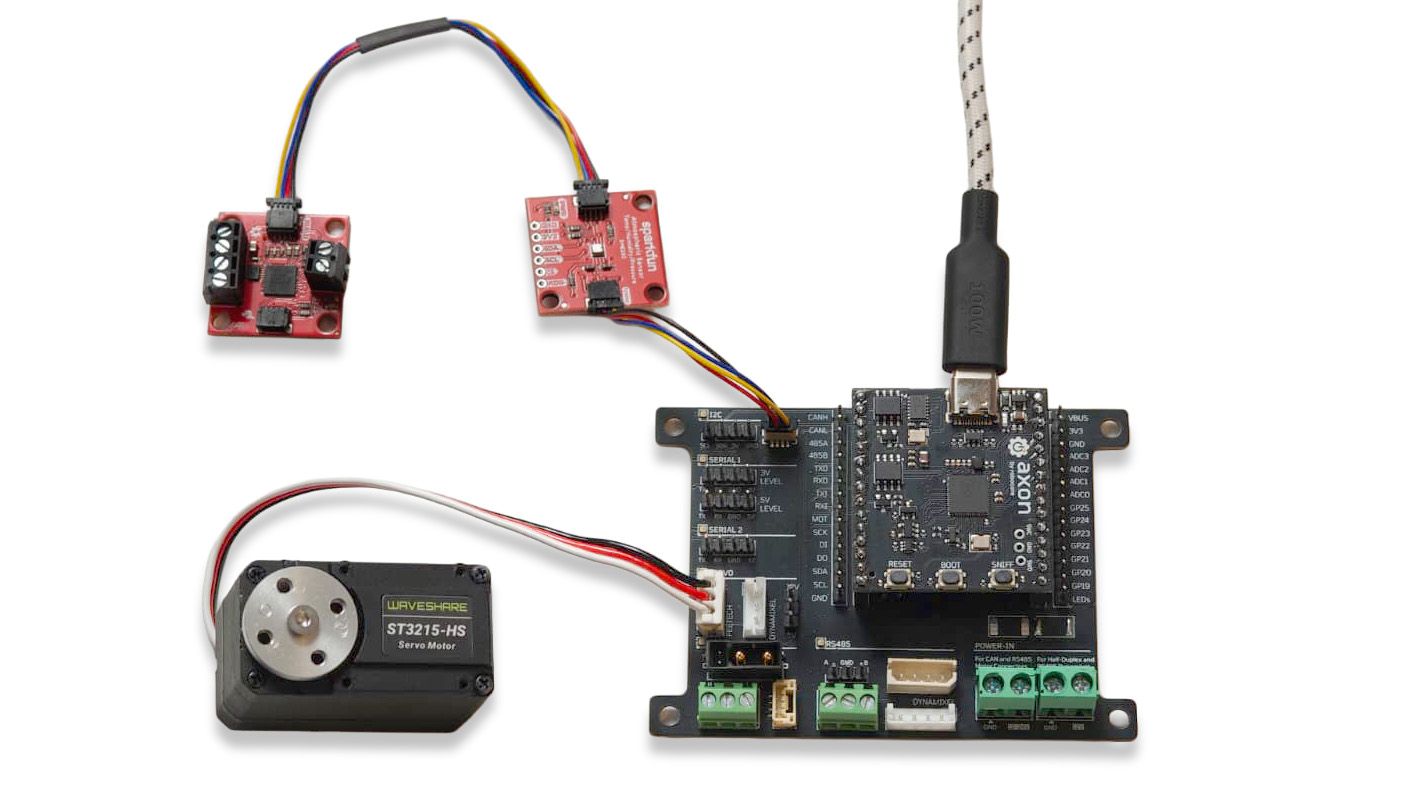
link101 is an open source circuit board that brings every actuator and sensor protocol onto one USB Type-C cable as standard Linux devices, no drivers to write. It lets you prototype with a general-purpose carrier, then design a purpose-built carrier matched to your production robot.
If you build robots with ROS 2, you already know the setup: a Pi or Jetson running your control stack. But how do you control the motors? You might have to rely on one USB-UART adapter per protocol. Device names that shuffle after reboot. A different driver situation for every actuator brand. link101 replaces that entire layer. Plug it into any Linux SBC via USB Type-C, and you’re granted simultaneous access to Feetech, Dynamixel, Waveshare, ODrive, CAN actuators (Damiao, CubeMars, Unitree, Moteus), RS485 drives, and I2C sensors, all on independent hardware buses, using a single cable.
Say you’re building a mobile manipulator: ODrive hub wheels for the base, Dynamixel servos in the arm, a Feetech pan-tilt for the cameras, a UART lidar, and an IMU for orientation. Four different buses and four different adapter situations are required for all of those various devices. With link101, it is one USB Type-C cable. Every actuator and sensor shows up as a standard Linux interface.
More importantly, it frees you to choose actuators based on what your robot needs, not on what bus happens to be wired in. Need to add an RS485 VFD for a spindle? The port is already there. Want Modbus sensors on the same build? Covered. The protocol decision stops being an architectural constraint and becomes a line in your config. Plus, when you’re ready to go into production with a custom PCB, link101’s modular design makes it ready for integration, firmware and all.
Its two modes let you use link101 how you see fit. In transparency mode, your existing ros2_control setup, launch files, and vendor drivers work as-is. Standalone mode is for when you need more: the RP2350 runs an on-MCU ROS 2 node via zenoh-pico over USB CDC, moving time-critical control loops off the host OS entirely, eliminating scheduling jitter. This requires writing application-specific firmware, but a project template and SDK are provided as a starting point. Same board, same connectors, two very different levels of involvement.
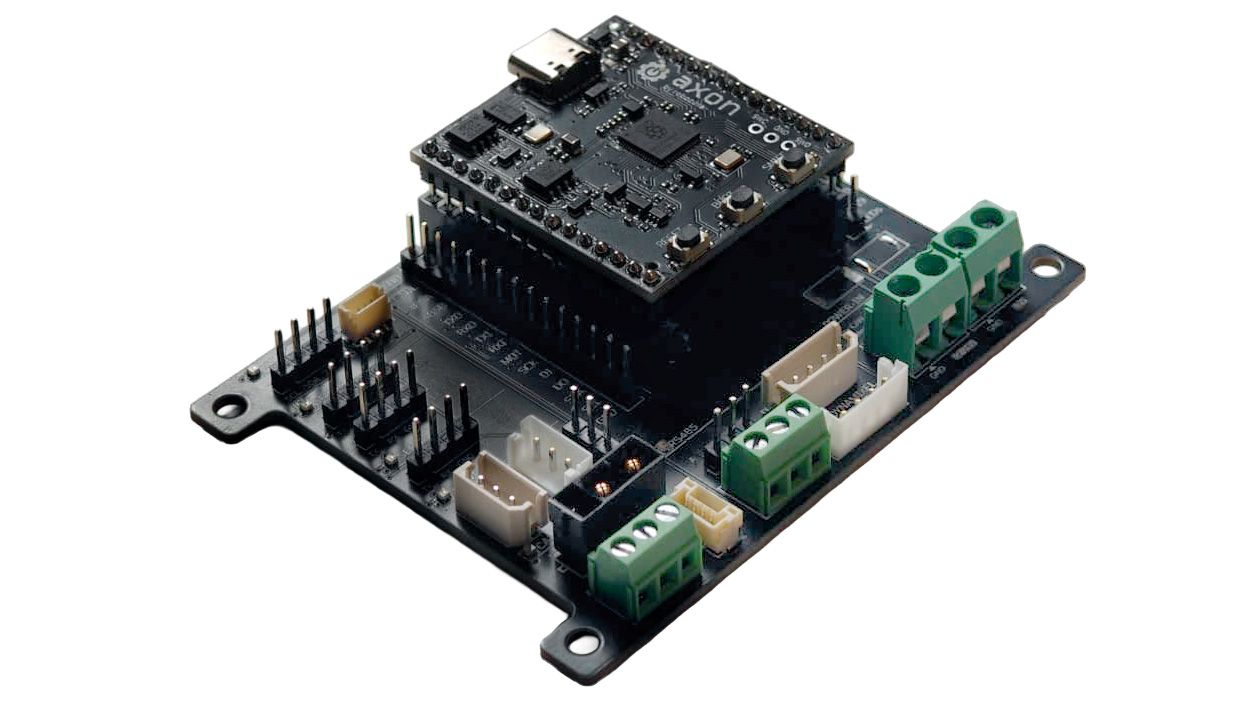
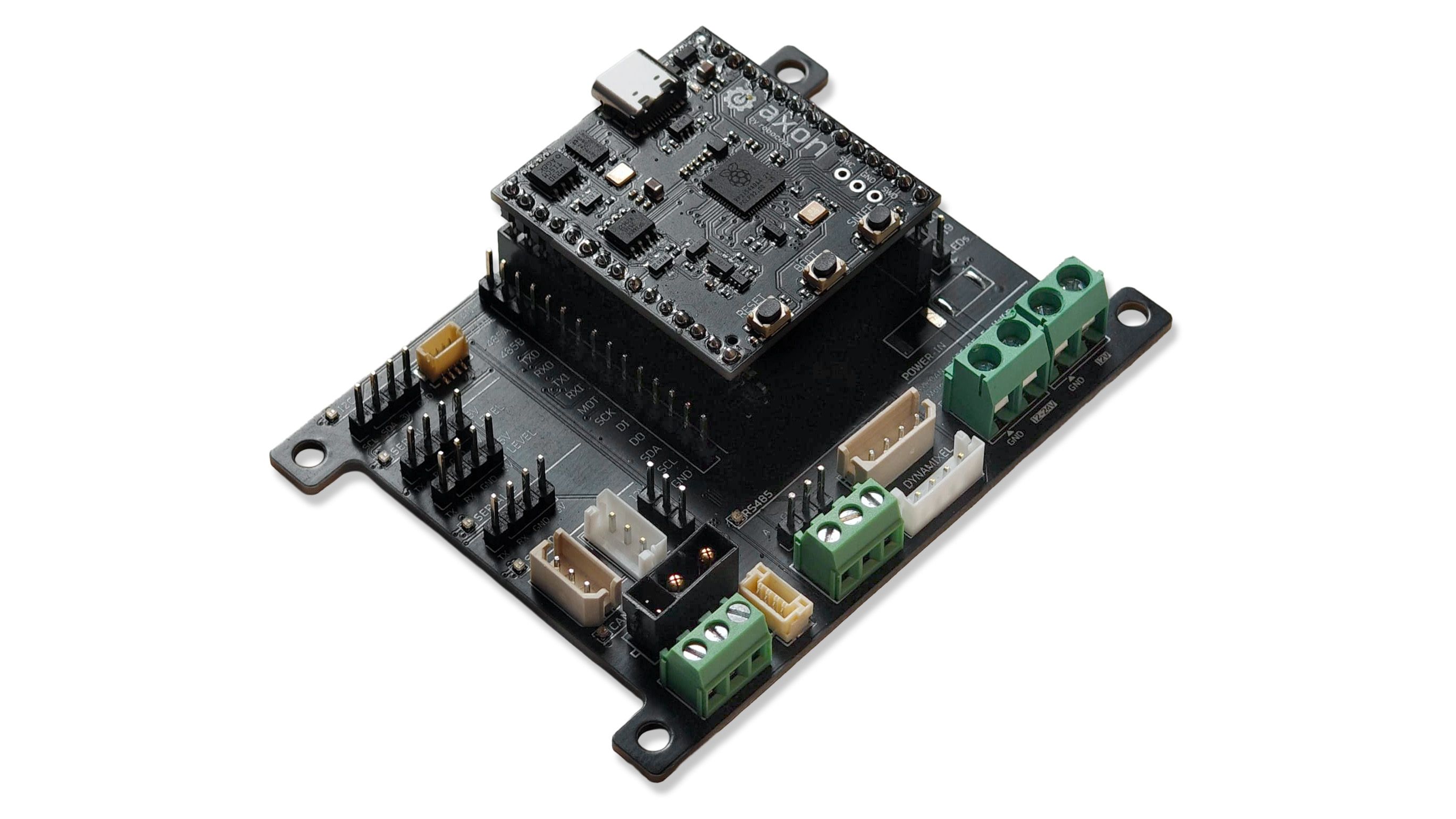
MCU: Raspberry Pi RP2350 (dual Cortex-M33 at 150 MHz, 520 KB SRAM, 2 MB flash)
/dev/axon-rs485, /dev/axon-can)link101 is open source across the stack. Hardware design files (KiCad schematics, PCB layout, fabrication outputs, BOM) and module footprints are released under CERN-OHL-W v2. Firmware SDK, protocol drivers, and ROS 2 packages are released under the MIT license. Custom carrier boards that use the module do not need to be open-sourced.
Firmware files are already available, and schematics/bom/etc will be available before the end of the campaign. Full KiCad project files will be published before boards ship to backers. The carrier board design serves as a reference for anyone designing custom carriers for their application.
Hardware: github.com/cristidragomir97/axon-hardware
Firmware: github.com/cristidragomir97/axon-firmware
Every driver written for link101, every carrier board designed from the KiCad template, every tutorial published is one less team starting from zero. For standalone mode, the firmware SDK exposes a clean interface for adding protocol support: implement a small set of functions, register a protocol name, and you have a working driver.
We strongly encourage sharing drivers back to the community via pull request. Once merged, every user gets access to the new protocol, and the contributor is credited in the project. In bridge mode, no firmware development is needed at all since existing host-side ROS2 packages and vendor tools work directly over the exposed Linux devices.
You can sign up at the top of this page to be notified when the campaign launches and to receive other updates. We only send out relevant content, and you can unsubscribe at any time.
link101 is part of Elecrow Project Aviary

We are a robotics consultancy and hardware studio building reusable open source tools for ROS 2 robots.