Iotera by Tensor Technologies, Ltd.
Microcontroller Boards
PCBWay
Bluetera II
The first full-stack dev board that uses protocol buffers for motion-based IoT applications

Iotera by Tensor Technologies, Ltd.
Microcontroller Boards
PCBWay
Many of our clients face a common challenge when undertaking IoT projects. They are experts in their own fields, and most of of them have a great idea, a proof-of-concept (PoC), or a sophisticated algorithm that addresses some specific need. They have simulated their solution in Matlab or Python and are eager to build and test a minimum viable product (MVP).
Unfortunately, designing a physical IoT device – or even prototyping one – is no easy task. Our experience has demonstrated that designers have a genuine need for a common, extensible, user-friendly, open source IoT platform that facilitates seamless interaction between the physical and the digital. Which is where we come in.
Our primary focus is on products and projects that sample motion, sense the physical world, and transmit the resulting data over Bluetooth Low-Energy (BLE) to smart devices running Android, iOS, Windows, and Linux. We created Bluetera I by stitching together key functionality, including communication hardware and basic motion sensing algorithms, as a way to provide the missing IoT platform our clients needed.
Bluetera II is the full realization of this same objective. It is open hardware running open firmware that includes motion sensors, power management, communication, and user-facing software – all woven together into a robust infrastructure for rapid IoT prototyping.
The demos in the video above were created primarily using the Windows-WPF application shown below. (You can find source code for this and other demos in our GitHub repository.)
The exact contents of your order will depend on the package you select when backing our campaign, but the Bluetera II Developer Edition includes the following:
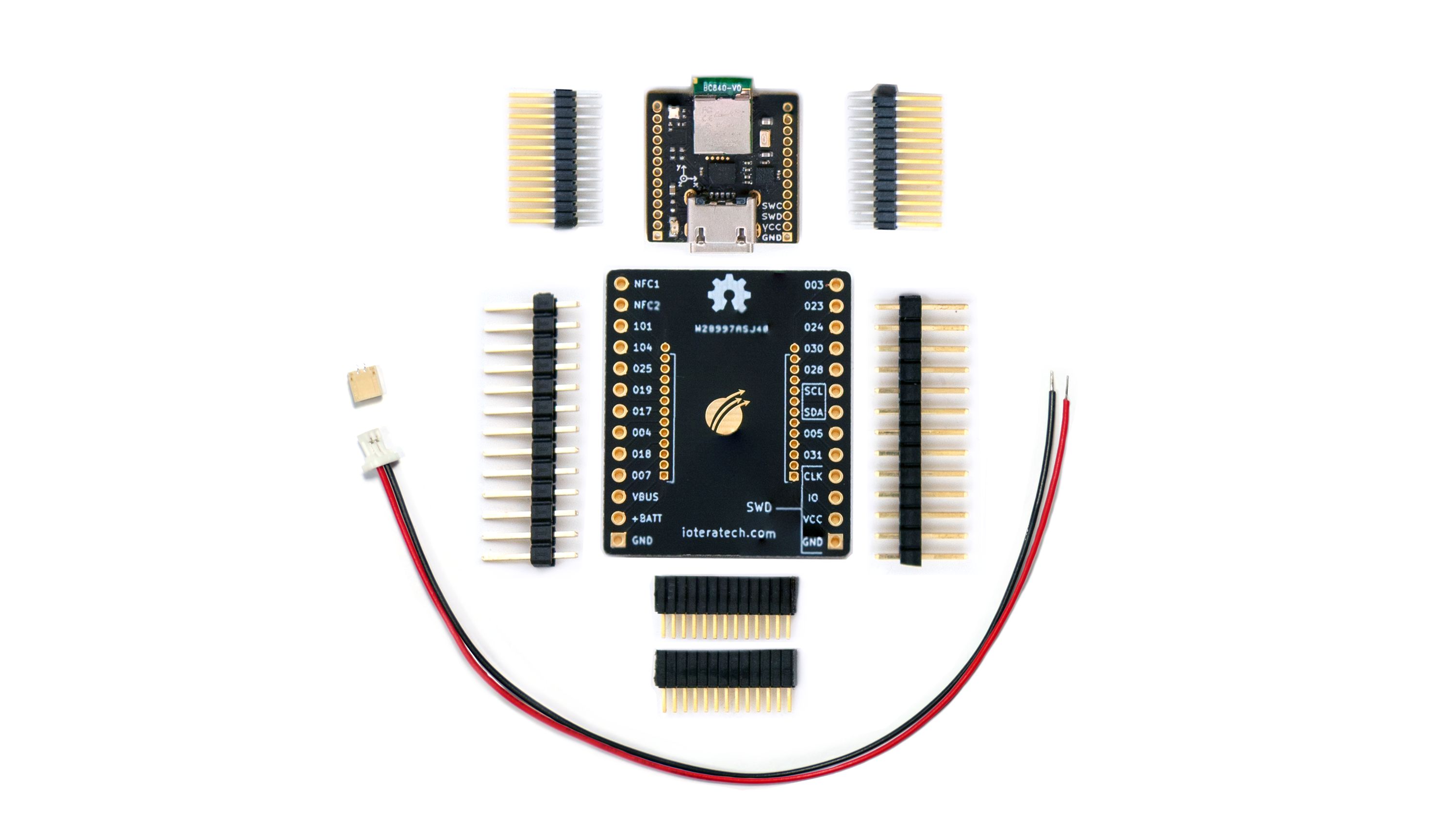
The Bluetera II board itself includes a female JST connector that accommodates an external Lithium-Ion battery. (When soldering the battery cable to the battery, please take care to connect the VCC and GND correctly.)
Bluetera II’s range is greatly affected by your choice of BLE module, which also impacts the overall dimensions of the board. The BC840 includes a highly compact, short-range PCB antenna. The BC840M includes a longer-range antenna that is slightly larger (but still quite small). And, if you want a Bluetera II that is somehow not tiny, your best bet is to choose a BC840E and attach a giant external antenna.



| BC840 | BC840M | BC840E | |
|---|---|---|---|
| Range | Short | Long | Ultra long (with external antenna) |
| Range with Line-of-Sight | 4 meters at 1 Mbps | 135 meters at 1 Mbps | 850 meters at 1 Mbps, 3400 meters at 125 kpbs |
| Size | 7.1 x 9.2 x 1.5 mm | 10.1 x 12.2 x 1.5 mm | 7.1 x 12.2 x 1.8 mm |
| Use for | Very short range line-of-sight applications where low data rates are acceptable | Long range applications, without line-of-sight, where high data rates must be maintained | Custom antenna designs |
For most use cases, we recommend the long-range printed antenna (BCM840M). You can find more information on the manufacturer’s website.
| Physical | |
| Dimensions | 18 x 18 x 1.2 mm (0.7 x 0.7 x 0.4 in) |
| Weight | 2 g (0.07 oz) |
| Fanstel BT40 module with nRF52840 | |
| MCU | 64 MHz Cortex-M4 FPU, 1 MB Flash, 256 KB RAM |
| Wireless | 2.4 GHz transceiver, +8 dBm TX power, Bluetooth 5 (2 Mbps & 1 Mbps long range), BLE mesh, ANT, 802.15.4, Thread, Zigbee |
| Connectivity | UART, SPI, TWI, PDM, I²S, QSPI, NFC-A, USB 2.0 |
| Encryption | 128-bit AES CCM, ARM CryptoCell |
| Other Hardware | |
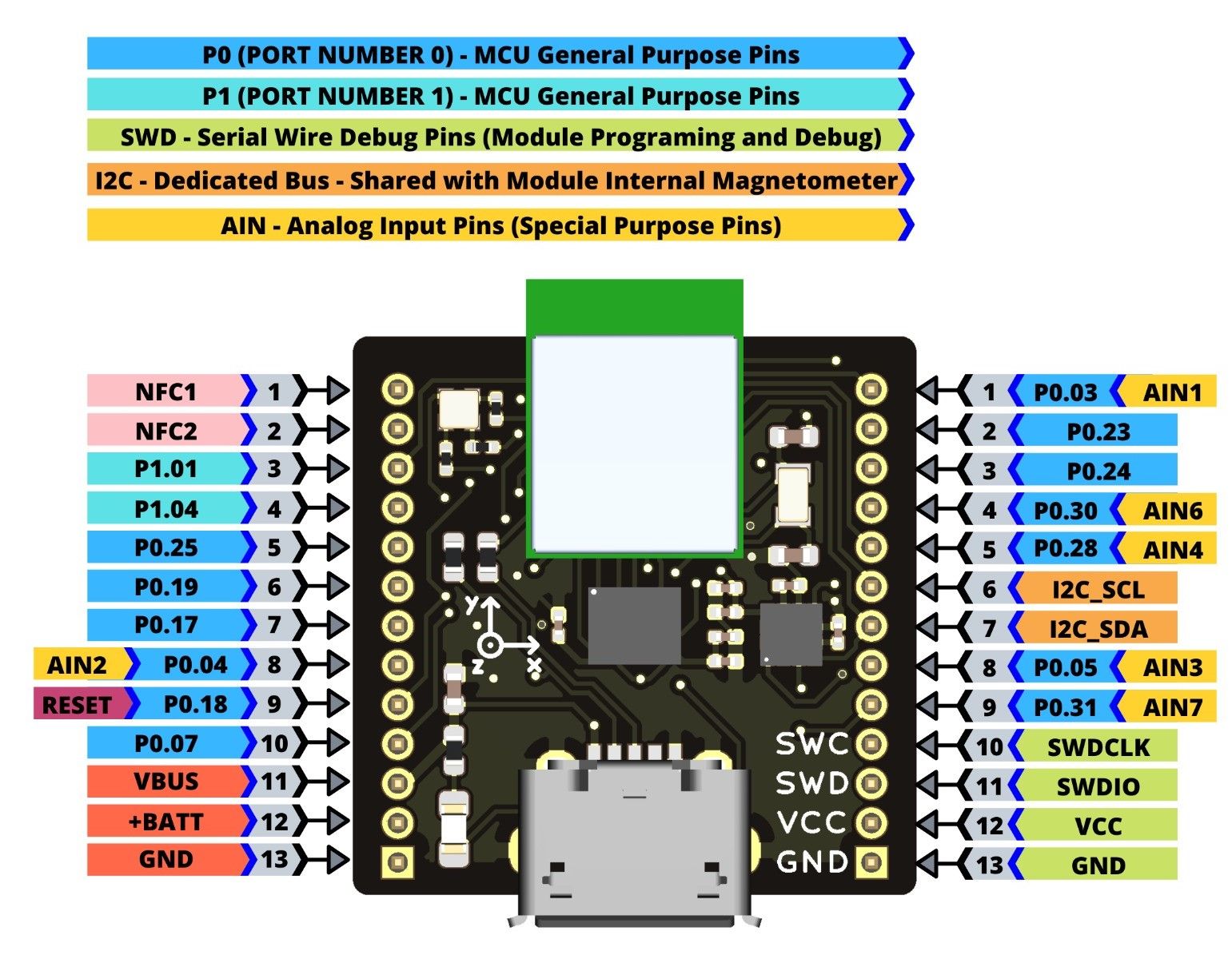
| Headers | 2 x 13, 1.27": Power, SWD, and GPIOs that can be configured as UART, I²C, ADC, etc. |
| Ports | Micro USB, JST power connector |
| Power | Power management firmware & charging circuitry for a Lithium-Ion battery |
| Motion | InvenSense ICM-45605 6-axis sensor, IMU ST LIS3MDL 3-axis magnetometer |
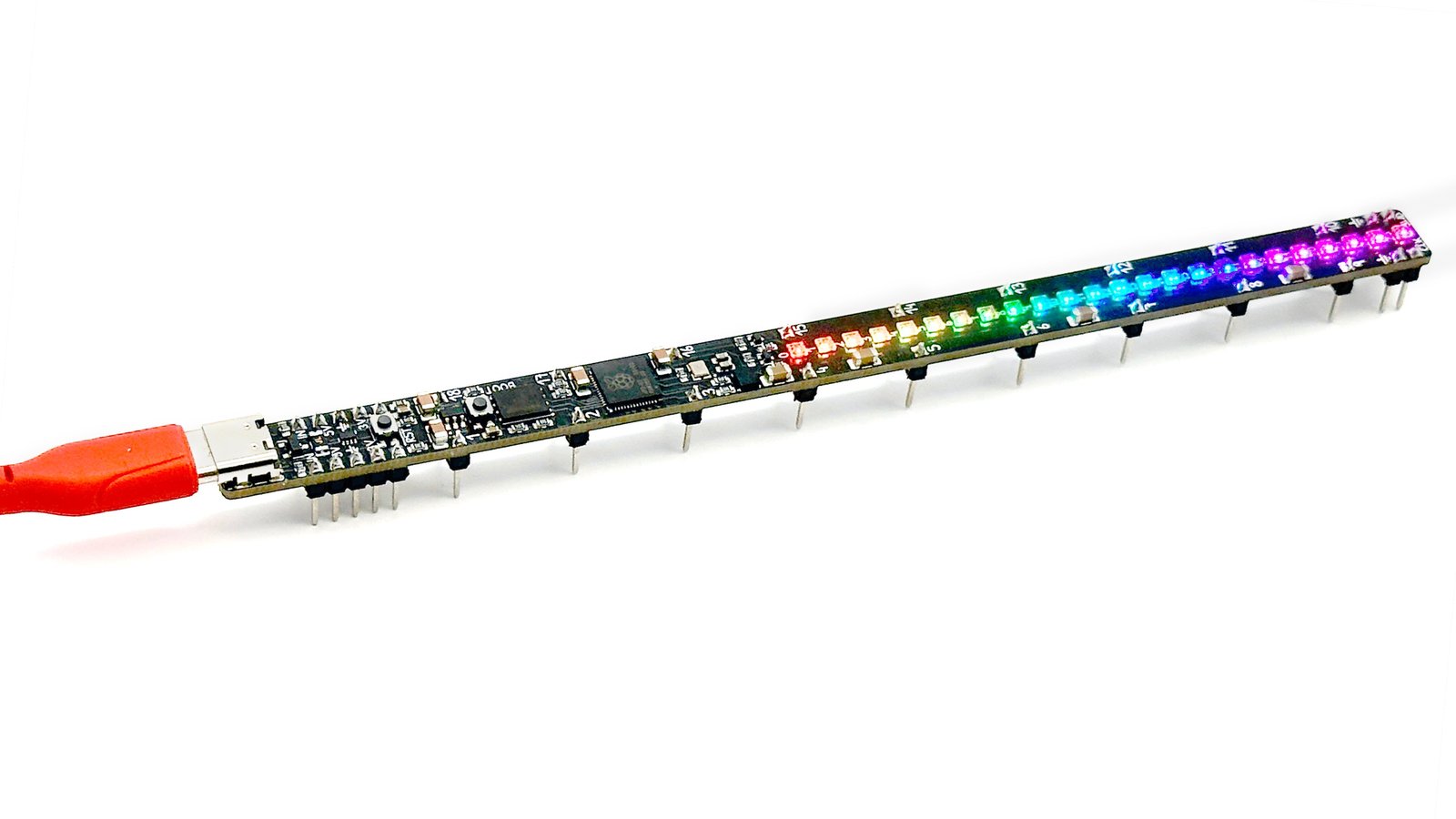
| Extras | RGB user LED, red charger LED, Li-IoN battery charger, 32.48 kHz xtal for RTC |
| Firmware | |
| Interfaces | Protobuf over BLE, peripherals (GPIO, UART, SPI, I²C, etc.) |
| Motion | 9-axis sensor fusion using the Madgwick Algorithm |
| Software | |
| SDK | Windows, Android, iOS |
| Plugins | Unity 3D framework |
| Name | Bluetera II | MMC – MetaMotionC | mti-1-series | SparkFun 9DoF Razor IMU M0 |
|---|---|---|---|---|
| Manufacturer | Tensor | MbientLab | Xsens | SparkFun |
| Purpose | General purpose IoT development | Wearable devices development | General purpose IoT development | General purpose IoT development |
| Special Features | Protobuf, motion algorithms, open source | End-to-end solution | Motion fusion algorithms | Arduino Compatible |
| MCU | 64 MHz Cortex-M4 with FPU | ARM C0 | Low-power MCU | Atmel's SAMD21 32-bit ARM Cortex-M0+ |
| Motion Fusion Algorithm Transparency | Madgwick-based, up to 2 kHz (Open) | Bosch sensor fusion (Closed) | XKF3TM sensor fusion (Closed) | InvenSense sensor fusion (Closed) |
| Wireless Communication | BLE, BLE Mesh, ANT, 802.15.4, Thread, Zigbee | BLE | NA | NA |
| Wireless Communication Rate | Up to 1 kHz | Standard (50 Hz) | NA | NA |
| Motion Sensors | 9-axis IMU (ICM-20649, LIS2MDL) | 10-Axis (BMI160, BMM150, BMP280) | 9-Axis IMU | 9-axis (MPU-9250) |
| Open Source | HW, FW, SW, Fusion | SW | SW | HW, FW |
| Size | 18 x 20 mm | 25 mm diameter | 12.1 x 12.1 mm | 152 x 101 mm |
| Cost | $50 | $75.99 | $192 | $36 |
All of our technical documentation resides in our GitHub repository, which is divided into four main sections:
and an installation guide
instructions on programming and debugging your Bluetera II
Google’s Protocol Buffers (often shortened to Protobuf) is a language-neutral, platform-neutral, extensible mechanism for serializing structured data. For Bluetera II, we use Protobuf to quickly add both uplink and downlink messages, which allows developers to focus on business logic instead of boilerplate code. Adding new functionality is as easy as:
bluetera.proto)Bluetera’s firmware uses the Madgwick sensor fusion algorithm, which transforms acceleration, gyro, and magnetometer data into quaternion rotation measurements.
The Madgwick algorithm is not only accurate and resource-efficient, it is open source (unlike most vendors’ fusion libraries) and remarkably customizable. This gives you the freedom to tailor the algorithm’s parameters for your specific application. In one use case, for example, we needed a high (1 kHz) quaternion data rate, but we could afford some drift after a while. Satisfying this requirement would not have been possible with vendor code, but Madgwick made it easy.
Our current plan is to work with Atid-el, a local manufacturer, to assemble the entire kit. We have also looked into working with PCBWAY in China, as we have used their service in the past, both for Bluetera I and for Bluetera II prototypes.
The MCUs will arrive at the production facility pre-programed with our latest Firmware, which will include self-test capabilities. Following production but prior to shipment, each Bluetera II unit will be hooked to an external power source, via the USB adapter, and tested.
Once we have tested and verified all units, the entire batch will be sent to the US for distribution to backers via Crowd Supply’s fulfillment services.
Delivery within the US is included in the listed price, while delivery outside the US will incur the international surcharge specified for the relevant pledge level. Deliveries to EU countries, Switzerland, Australia, and Canada will have VAT and customs duties paid in advance, so backers in these countries will have no need to deal with Customs.
See Crowd Supply’s article on Ordering, Paying, Shipping: The Details for more information on delivery, VAT payments, etc.
Designing, developing, building, and testing hardware is never easy. Bugs can always slip by, and they are not always easy to fix. Fortunately, we have extensive knowledge related to designing, developing, and testing IoT hardware. Bluetera II is our fourth IoT project, and our second product in the Bluetera series. Our experience with the first-generation Bluetera board, in particular, will reduce R&D risks substantially and help us deliver a high-quality, second-generation product.
Shipping logistics come with their own set of risks: component shortages, bad batches, and shipping delays, to name just a few. We are working with well-respected vendors and production facilities to avoid problems like these, and we have a Plan-B manufacturing alternative just in case.
Naturally, we will keep backers appraised through project updates should any setbacks occur during manufacturing or fulfillment.
Produced by Iotera by Tensor Technologies, Ltd. in Ramat-Yishay, Israel.
Sold and shipped by Crowd Supply.

A single Bluetera II module. Optional: one CSR BLE-4.0 dongle (recommended for Windows and some Linux systems)

A single Bluetera II module, one easy debug expansion board with all headers & connectors. Optional: one CSR BLE-4.0 dongle (recommended for Windows and some Linux systems)
Two Bluetera II modules, two easy debug expansion boards with all headers & connectors. Optional: one CSR BLE-4.0 dongle (recommended for Windows and some Linux systems)

Five Bluetera II modules, five easy debug expansion boards with all headers & connectors. Optional: one CSR BLE-4.0 dongle (recommended for Windows and some Linux systems)

We are a group of developers and makers who hav been engaged in IoT, data science, AI, and machine learning for quite some time. Our team works in multiple domains, including wearable devices, agritech, IIOT, Medical devices, and VR/AR applications.

A tiny, mighty ESP32 development board
A long, lean, delicious development board with a unique form factor and high-quality components

Wireless, fully programmable, open source, ESP32 macropad featuring 16 RGB, mechanical, hot-swappable keys and two RGB rotary encoders