Capable Robot Components
Protocol Interfaces
Programmable USB Hub
A USB hub with per-port power and data disconnects + dev board + I2C, GPIO, and SPI bridges

Capable Robot Components
Protocol Interfaces

The Capable Robot Programmable USB hub is housed in a robust extruded aluminum enclosure.
Internally mounted LED light pipes direct status information from 10 RGB LEDs to the front panel for easy observation of hub state.
The rear of the enclosure exposes the upstream USB connection and a USB port to re-program and communicate with the internal MCU. Also exposed are two I2C buses (via Sparkfun Qwiic connectors), the Programmable USB hub’s UART, and 2x GPIO. Input power is provided to the hub by a locking Molex connector.
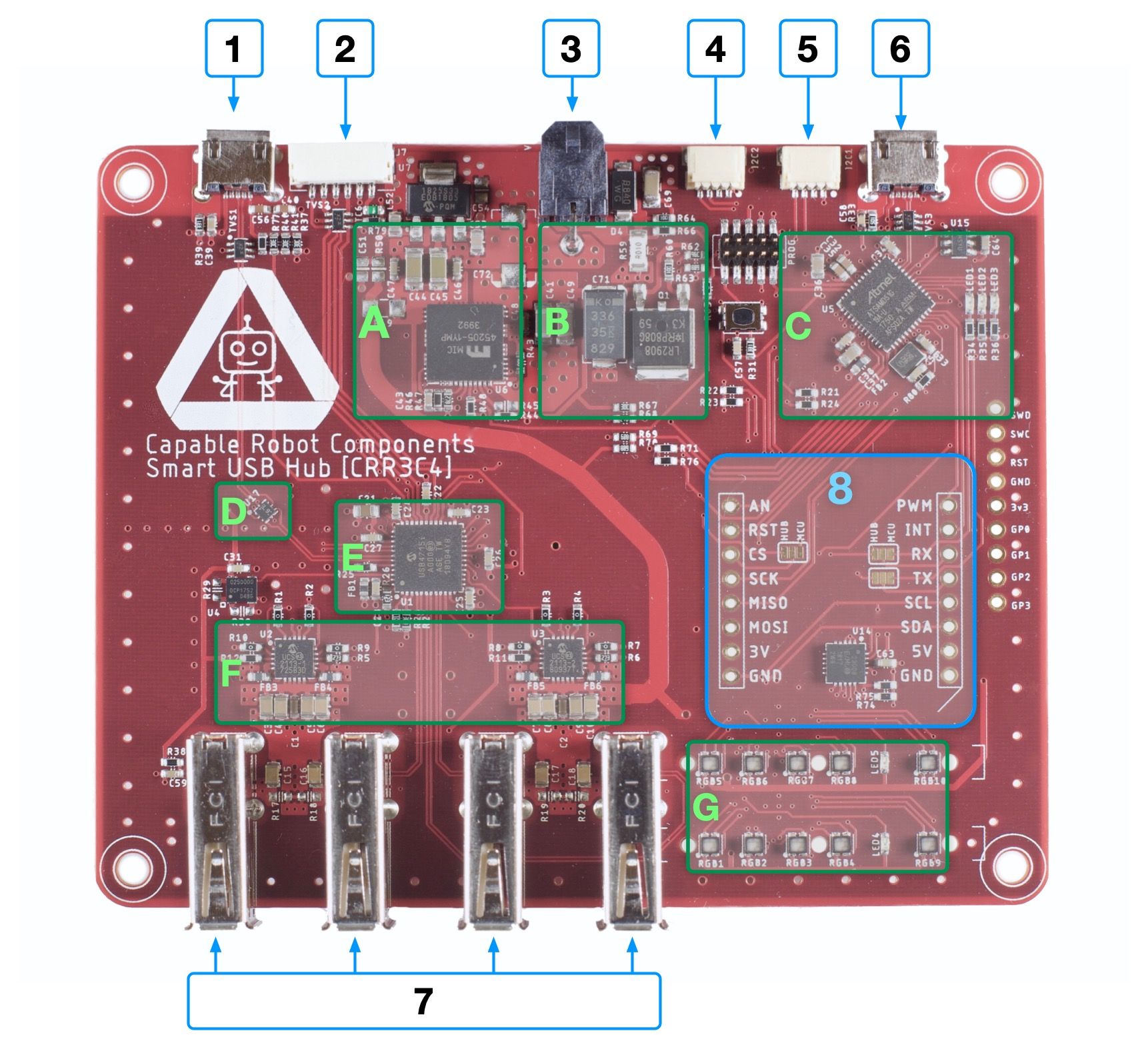
| Blue: Connectors & IO | Green: Functional areas of the board |
|---|---|
| 1. Upstream USB | A. 5V 6A Regulator |
| 2. USB UART & GPIO | B. Input Protection |
| 3. 12 V / 24 v DC In | C. Programmable Microcontroller |
| 4. USB Hub I2C | D. 1 of 5 USB Data Disconnects |
| 5. MCU I2C | E. USB Hub |
| 6. MCU USB | F. Downstream USB Power Protection & Switching |
| 7. 4x Downstream USB | G. RGB Status LEDs |
| 8. mikroBUS Header |

With the default firmware behavior, the Data LEDs show per-port data state with the following meaning:
Likewise, the Power LEDs show per-port power draw in blue, with higher port power displayed as a brighter blue. Ports which have power turned off are lit orange and any over-current condition is shown by lighting the LED red.
| Device | Data LED | Power LED |
|---|---|---|
| Port 1: JTAG Debugger | White : High Speed Device | 106 mA |
| Port 2: TinyFPGA BX | Green : Full Speed Device | 13 mA |
| Port 3: USB Mouse | Blue : Low Speed Device | 80 mA |
| Port 4: Phone | Orange : Data Lines Disabled | 492 mA |
The CircuitPython firmware is easy to modify to change how these RGB LEDs display Hub state.
The Programmable USB Hub is proudly open source. You can use MIT-licensed Python drivers to control and monitor your USB Hub the way you want to. The Hub can be easily integrated into hardware-in-the-loop (HITL) test systems and its’ in-built IO expansion allows the Hub itself to control or stimulate the Device Under Test (DUT). You can also automate testing of embedded USB devices - simulating USB unplug events and unexpected loss of USB power. Use the upstream USB port or the MCU USB port to control and monitor the USB hub.
An ATSAMD51 microcontroller configures the USB Hub IC and is available for you to reprogram to change the behavior of your hub. The microcontroller ships with open source CircuitPython firmware, which is updatable over the MCU USB connector. No drivers or reflashing hardware is needed — Python firmware shows up as files on a small flash hard drive when connected to your computer and code can be immediately edited.
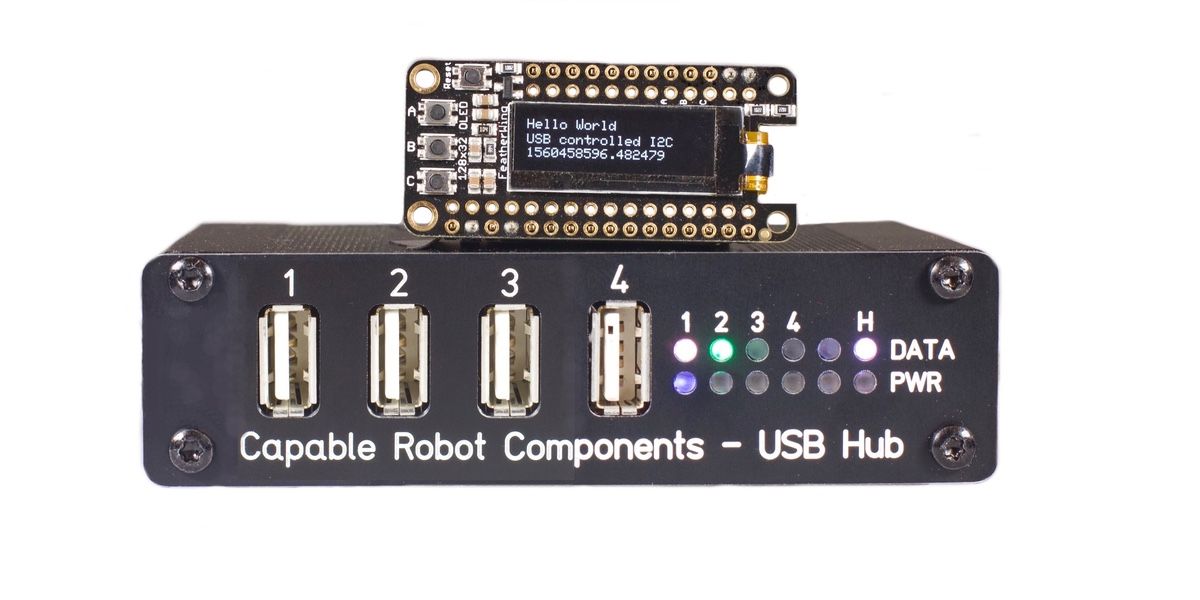
Here, CircuitPython software running on the upstream Mac OS Host (not the internal MCU) is controlling this OLED display, which is attached to the Hub via the rear Qwiic I2C port. The Driver Repository includes a Bridge, allowing unmodified CircuitPython libraries to run on Mac OS, Linux, & Windows and communicate with devices attached to the Hub.
Alternatively, the MCU’s CircuitPython firmware can be modified to communicate with external sensors or devices to create automatic behaviors which do not require host driver control.
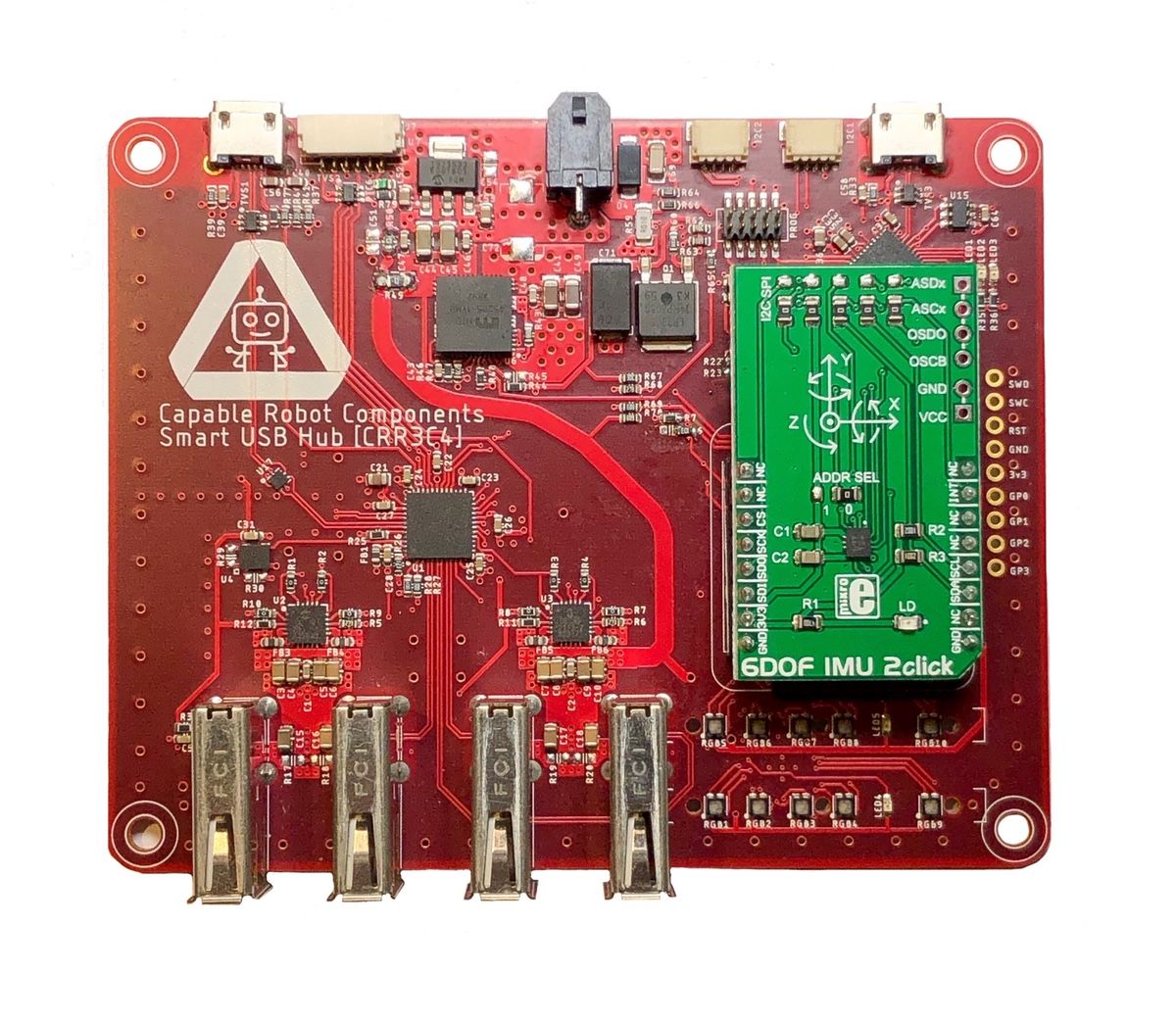
Here, an IMU board has been installed into the mikroBUS port and the built-in CircuitPython firmware changed to detect and respond to tap events.
How the Hub responds to these events is up to you, instead of displaying text on the OLED screen, the hub could:
The Programmable USB Hub is designed to be durable and robust. The OEM version (board only) has corner mounting holes for easy integration into a custom enclosure. The Micro-USB connectors are reinforced, and the IO is protected from ESD strikes (exact specification TBD).
The locking input power connector features reverse polarity protection and over-voltage protection. The extruded aluminum enclosure for the Hub can be fitted with optional rubber bumper end caps or optional flange mounts.

Currently, there are two GitHub repositories which have relevant software and documentation for the USB Hub.
Please open a GitHub issue if you have a suggestion for the product or run into any problems using it, or use the “Ask a Question” link below.
If you have a question about ordering, paying, or shipping, please refer to The Crowd Supply Guide.
| Capable Robot: Programmable Hub | Acroname: S77-USBHUB-2X4 | Moxa Uport 404 | Digi HubPort 4C | |
|---|---|---|---|---|
| Control API | Python, Open Source | C++ & Python via BrainStem API | None | None |
| Firmware | CircuitPython, Open Source | Closed Source | None | None |
| Price | $220 | $325 | $223 | $241 |
| USB Monitoring & Control | ||||
| Upstream Port | Data Enable / Disconnect; Host Swapping & Sharing via FlexConnect | Two Upstream, Switchable | None | None |
| Per-Port Control | Data Enable / Disconnect | Data Enable / Disconnect | None | None |
| Per-Port Monitoring | Speed of Attached Device | Device Presence | None | None |
| Boost Data Signal | Yes | Yes | No | No |
| Power Monitoring & Control | ||||
| 5 Volt Regulation | 6 A | 10 A | 2 A | 2 A |
| 5 Volt Voltage Monitoring | 1.6 mV | 1.2 mV | None | None |
| Supply Voltage Monitoring | 9.5 mV | 8 mV | None | None |
| Per-Port Power Control | Yes | Yes | None | None |
| Per-Port Current Limit | 500mA to 2.5A | 500mA to 2.5A | 500mA | 500mA |
| Per-Port Current Monitoring | 13.3 mA resolution | 9.8 mA resolution | None | None |
| IO Expansion | ||||
| Connectors | Qwiic, mikroBUS, JST GH | None | None | None |
| UART | 1 | 0 | 0 | 0 |
| I2C | 1 via USB, 1 via MCU | 0 | 0 | 0 |
| GPIO | 2 via USB, 4 via I2C Expander | 0 | 0 | 0 |
| SPI | 1 (USB or MCU Master) | 0 | 0 | 0 |
| ADC | 1 via MCU | 0 | 0 | 0 |
| Physical | ||||
| Input Power | 9 V to 25 VDC | 9 V to 24 VDC | 12 to 40 VDC | 5.5 to 30 VDC |
| Power Connector | Molex MiniFit Jr | DC Barrel | Locking DC Barrel / Terminal Block | Locking DC Barrel |
| Mounting | Optional Side Flanges | Optional DIN Rail Kit | Optional DIN Rail and Wall Kits | None |
| LEDs | 10x RGB on front panel | 18x on case top | 9x on front panel | 5x |
| Size | 108 x 88 x 30 mm | 86 x 97 x 28 mm | 130 x 80 x 35 mm | 66 x 76 x 25 mm |
Programmable USB Hub printed circuit boards will be assembled in the USA by a contract manufacturer who’s been involved in prototype production. The aluminum enclosure and custom front & rear connector panels will be made in China by BOX Enclosures. We’re doing the final flashing, assembly, and testing of every unit here in Exeter, New Hampshire, USA.
All orders will be shipped using Crowd Supply’s fulfillment services, from the United States.
We want to make sure the Programmable USB Hub is available to everyone, but unfortunately shipping internationally from the US is expensive and complicated. Because of this, we must include an international shipping fee for backers outside the US.
For more information, you can refer to this useful guide to ordering, paying, and shipping.
During the campaign, final rounds of prototype testing will be completed as well as any required design changes. A short run of production boards will be ordered to verify these changes prior to the full production order.
Currently, design changes to be made include:
This list will be updated with any other changes being made to the pre-production design.
Creating physical objects is always risky and challenging. For example, parts currently in stock may go out of stock before the production run. However, there are ways to mitigate production risk - like returning to proven and familiar PCB assembly houses.
We will provide updates explaining how we are addressing any delays of any kind. We know that many of you are interested in the manufacturing process, and that includes learning about any problems we might run into and how we solve them.
Produced by Capable Robot Components in Exeter, NH .
Sold and shipped by Crowd Supply.

Fully assembled Programmable USB Hub PCBA in a custom metal enclosure with light pipes and rubber feet.

Fully assembled Programmable USB Hub PCBA in a custom metal enclosure with light pipes and rubber feet. Also includes a power supply, Aux cable, I²C cable, and USB cable.


Early Bird pricing and limited availability! Includes one Programmable USB Hub PCBA, with a custom metal enclosure, light pipes, and rubber feet. Also includes a 24 volt power supply, Aux cable, I2C cable, and USB cable.

Capable Robot Components enables rapid development of autonomous robots by providing technological building blocks to system integrators. Right now, integrators have to develop things they would rather purchase because the right robot-first products don't currently exist. CRC provides proven products which are domain-agnostic, but configurable and adaptable to the integrator's market needs. This allows autonomous system developers to spend more time and effort on domain-specific engineering and testing.
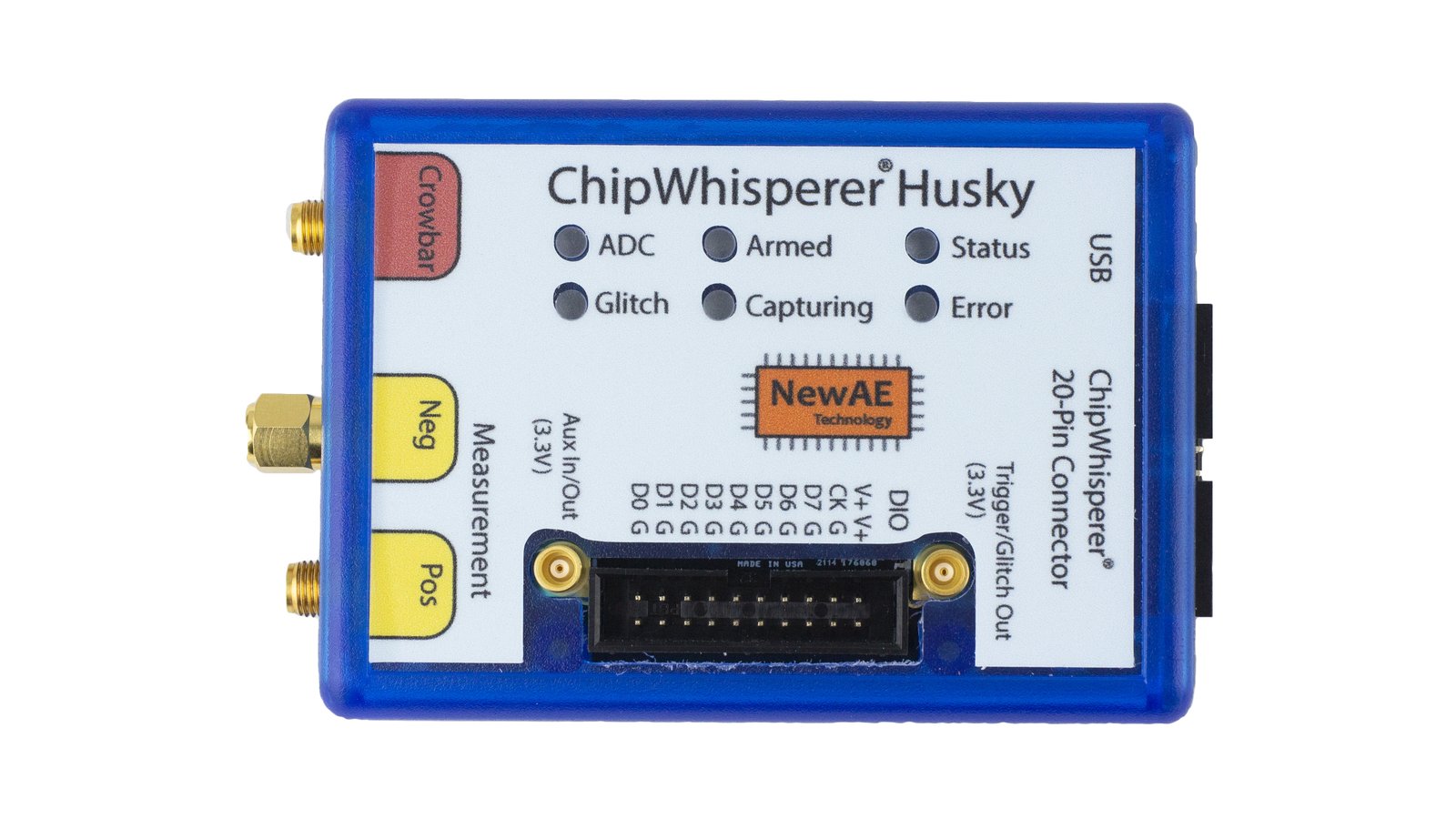
The power-analysis and fault-injection tool you can hold in your paw
An open source hardware accessory that supports log capture, simplifies CLI interaction, and facilitates firmware updates for USB Type-C devices

A tiny FIDO2 security key for two-factor authentication and passwordless login
