Harmonic Bionics, Inc.
Industrial Automation
Mouser Electronics
EASE
Connect Arduino boards, Arduino-like boards, and Arduino shields with EASE

Harmonic Bionics, Inc.
Industrial Automation
Mouser Electronics
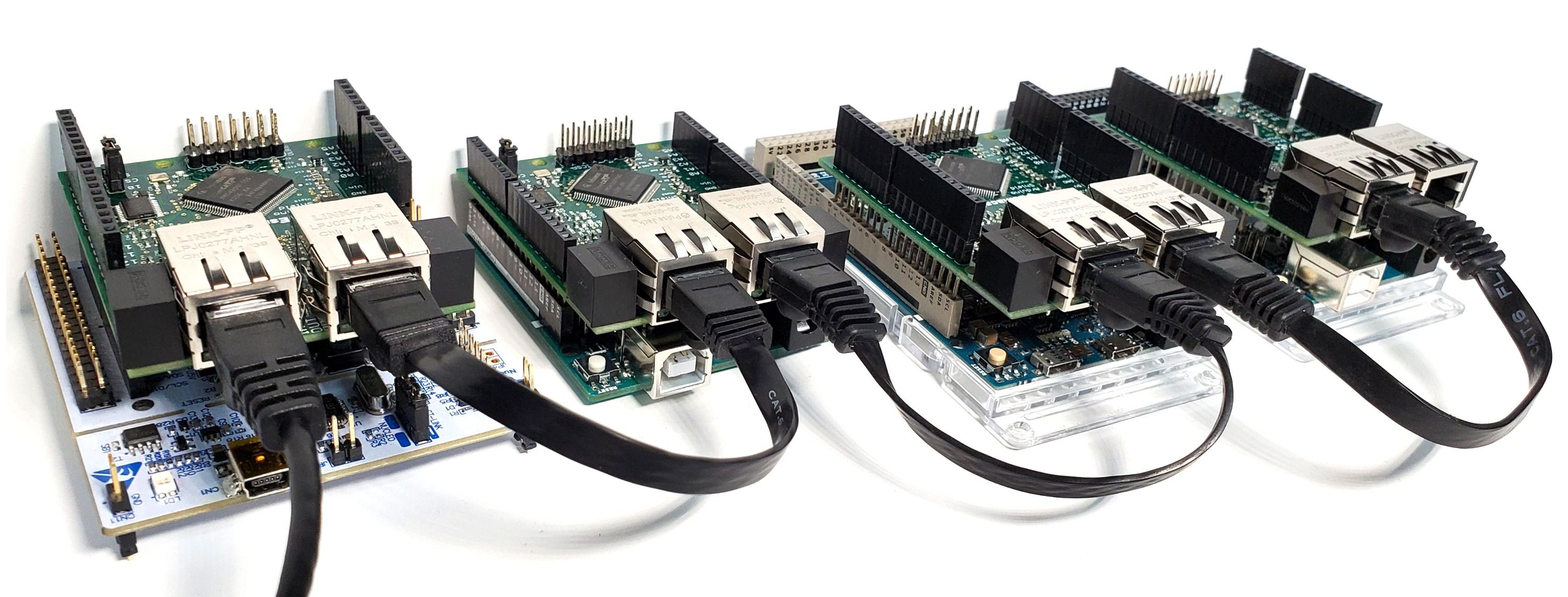
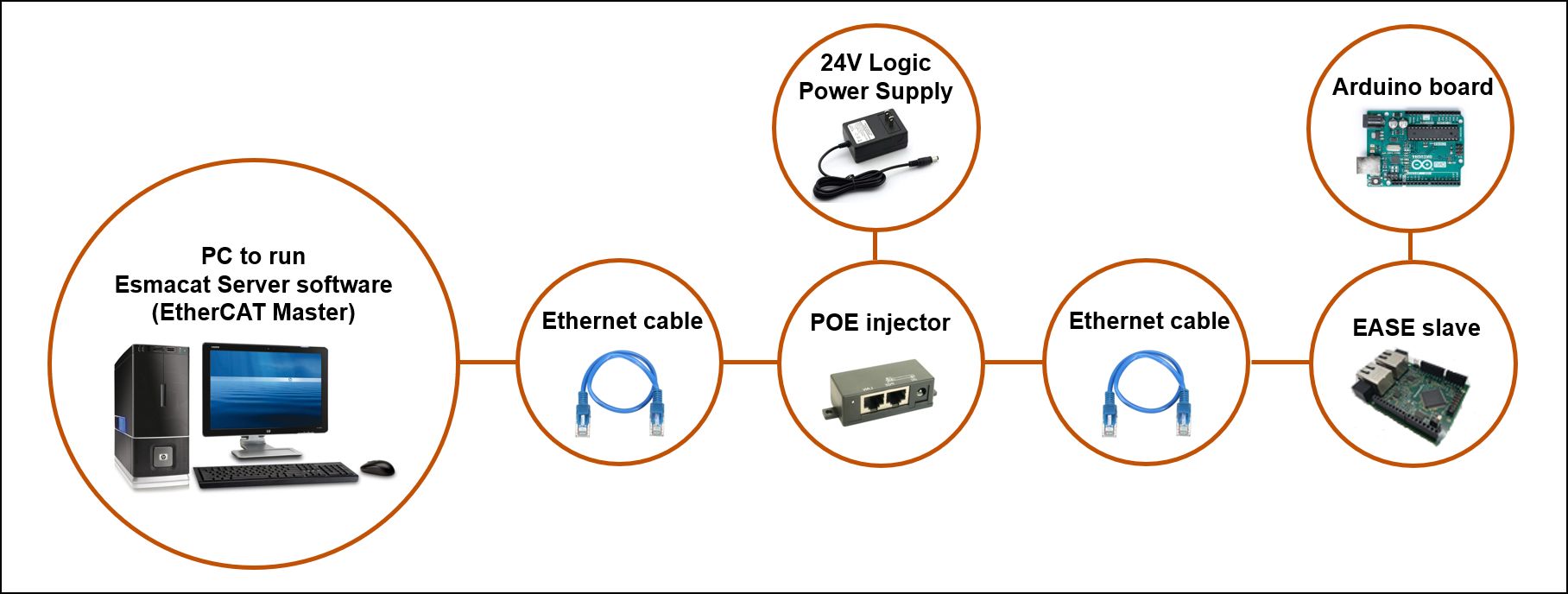
EtherCAT Arduino Shield by Esmacat (EASE) is an UNO Shield that stacks onto Arduino boards (or Arduino-like boards such as Mbed) and provides an SPI interface to data packets that are sent or received using the EtherCAT protocol. Those data packets can also be read or written by an EtherCAT master device. We offer two different versions of the Esmacat Master, or you can assemble your own using our open source software. Standard Ethernet cables can be used to connect multiple EASE boards, in a daisy-chain topology, and to provide power.
The high-speed communication of EtherCAT, which is 200 times faster than CAN-bus and 1,000 times faster than traditional RS232 communication, allows for the seamless integration and centralized control of multiple baseboards. For more information about EtherCAT, please have a look at our FAQ.
One major problem encountered by Arduino users – whether they are students building a school project or engineers prototyping industrial machines – is the lack of a common solution for expanding their projects to incorporate multiple Arduino boards and gain access to additional I/O pins. Arduino peripherals, including Arduino shields, sometimes take up multiple I/O pins and leave little room to create a project that requires multiple Arduino peripherals. This limits designers’ creativity. And even if they are* able to employ multiple Arduino boards to expand their project, users have no standard way of syncing those boards to produce a single connected project. This is now a problem of the past!
The EtherCAT master device described above is merely a portal capable of initializing different EtherCAT slaves, including EASE. Once initialized, any EtherCAT slave can send data to the master, which can either use those data – printing values to a GUI, for example – or send them on to other EtherCAT slaves. In other words, flipping a switch on one slave could activate an LED on another slave.


EASE specifically has eight data registers that can be read from or written to using functions that are available both to the EtherCAT master and through the Arduino IDE. Data packets are exchanged via SPI, which is universal across many MCU boards. This architecture is far more versatile than one in which the Arduino MCU implements the ability to connect, say, an Arduino Uno to a Nucleo 64.
A 24 V PoE injector is inserted between the EtherCAT master and the neighboring EASE board. It not only transmits data between the master and all connected EtherCAT slaves, it also provides power to all slaves, so there is no need to externally power each subsystem.
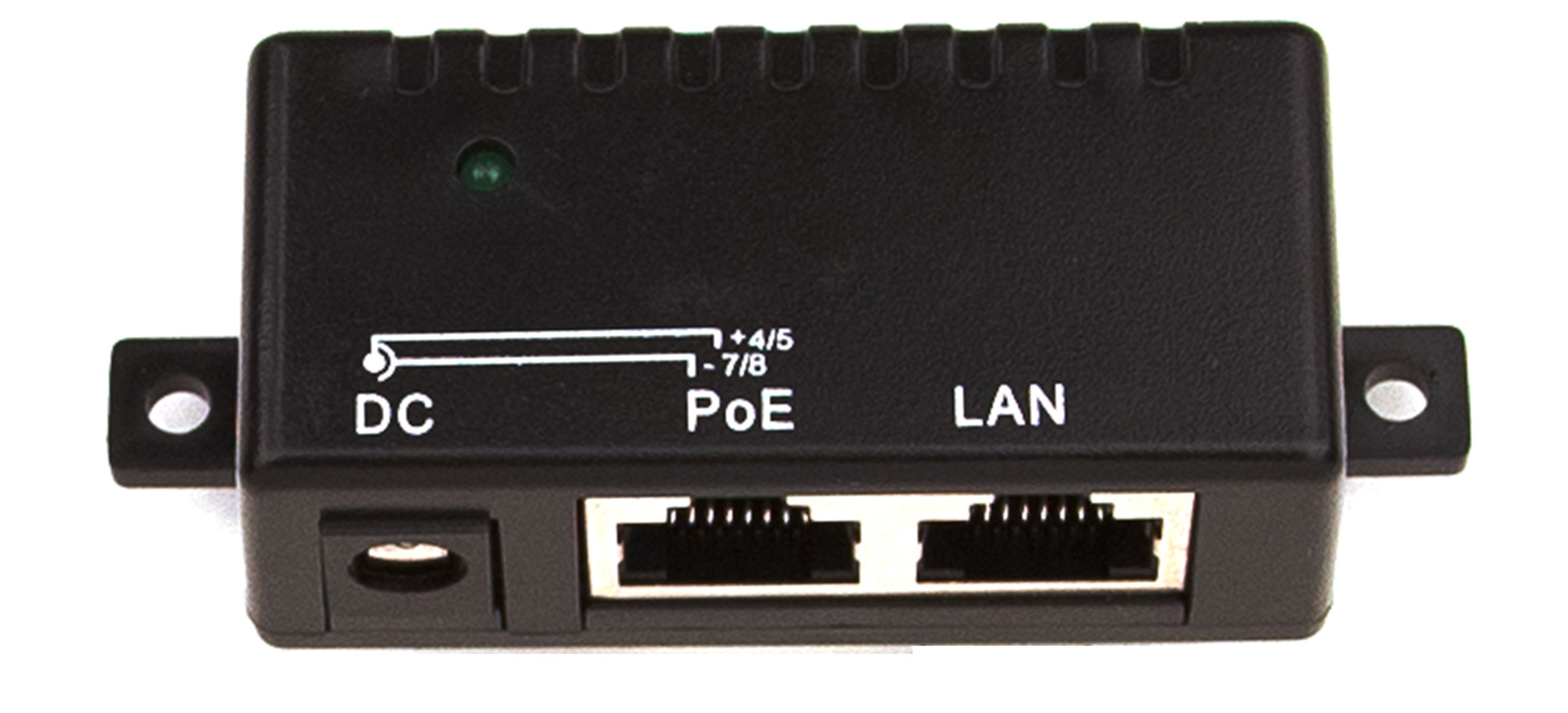
Important: EASE is rated for a 24 VDC PoE injector. Do not attempt to use it with a higher-voltage injector.
In addition, EASE runs the EtherCAT software on the shield itself rather than on the Arduino. This allows for high-performance applications to be developed on the EASE-Arduino subsystem, as the Arduino board is not busy trying to run the user’s application as well as the EtherCAT software.
| EASE | CAN-Bus | RS232 | RS485 | |
|---|---|---|---|---|
| Speed/Cable Length | 200 Mbps at 100 m between two nodes for full speed | 1 Mbps at 40 m from the start to end nodes | 19,200 bps at 15 m from the start to end nodes | 1 Mbps at 120 m from the start to end nodes |
| Cable Topology | Daisy Chain, Point-to-Point, Combination of the above | Daisy Chain | Point-to-Point | Daisy Chain, Point-to-Point |
| Max Number of Nodes | 65535 | 128 | 1 | 32 |
| Open Source Software | Yes | Most of CANOpen is proprietary | No predetermined protocol | No predetermined protocol |
| Required Hardware at master | Regular Ethernet adapter | PCI, USB, IC-type interface | PCI, USB, IC-type interface | PCI, USB, IC-type interface |
You can find all of our documentation, including tutorials, datasheets, and schematics on our website, which also hosts the Esmacat Master code. Finally, check out our Hackster.io page, where we plan to post EASE tutorials moving forward.
We have worked successfully with PCBWay on previous prototypes, and we plan to contract them for EASE fabrication and assembly. Once we receive the manufactured EASE boards, we will add various finishing touches ourselves. This includes soldering pin headers, uploading firmware, and carrying out a rigorous QC testing process to ensure that only high quality products are shipped to backers.
Each EASE board will be put into a small Esmacat box with foam to protect it. This box will then go into a larger box with more protection. The size of the larger box will depend on the number of products in the package. It will then be shipped to Crowd Supply for fulfillment. Please see theCrowd Supply Guide for information about shipping logistics.
We are prepared to handle any challenge that may come our way! Our current prototype has been tested thoroughly, so there shouldn’t be any hardware problems with EASE. EASE goes through a quality control process, and we will ensure that we never send out a damaged product. We have experience working with PCBWay and are familiar with their manufacturing process. If we encounter unforeseen shipping mishaps – damage, loss, etc. – we will find the source of the problem as quickly as possible and send an immediate replacement if there is no easy fix.
Produced by Harmonic Bionics, Inc. in Austin, TX.
Sold and shipped by Crowd Supply.

One Arduino shield, in Uno form factor, with EtherCAT capabilities for use when connecting multiple Arduino boards

A 24 VDC PoE Injector to power all EtherCAT slaves and to transmit data from the Esmacat Master. A single PoE Injector is necessary for most EASE configurations.

The mission of Harmonic Bionics is to innovate the rehabilitation process with robotic technology. The company was founded in 2016 as a spin-off of ReNeu Robotics Lab at the University of Texas at Austin. We are actively developing a robotic platform for introduction into the clinical market, and we aim to revolutionize the fields of therapy for stroke and spinal cord injury. Our exoskeletons are already being tested in pilot clinical trials and are well known in the rehabilitation robotics research community.