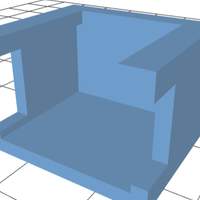
Getting Started Resources & 3D Printed Accessory Files
Once you have your RoverWing, here is a useful list of resources for getting started. During these past few weeks we have also designed some accessories for the RoverWing ecosystem that can be downloaded and 3D-Printed! Read the full update.

Shipping Soon!
We are happy to announce that we have completed firmware flashing and testing, and shipped all the RoverWing boards to the warehouse for final distribution! Please take this time to check your shipping address. Read the full update.

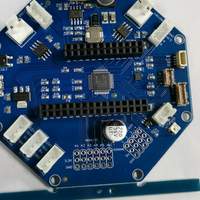
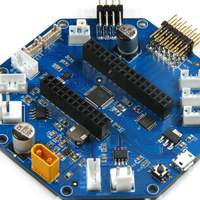
RoverWing Boards are here!
The day after Christmas, we got the assembled boards from Elecrow by DHL! The shipment took longer to get here than usual, but this was not surprising given the holiday shopping craziness. Anyway, the boards are here, and they turned out great! We have already uploaded the bootloader and did the basic testing, which worked fine. Read the full update.
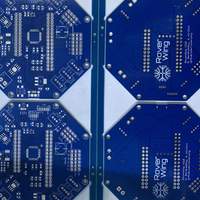
Board Fabrication Complete!
It took longer than expected, but we got the word that RoverWing board fabrication has been completed, and the boards are ready to be sent to us! Read the full update.
Production Update
The latest news from our production fab house: Elecrow.com has finished producing the PCBs and sourced all necessary components, so they are ready to start assembly! Read the full update.
Happy Thanksgiving to our US backers!
And as a Thanksgiving gift, we wanted to give you an update. We have received all the RoverWing Top boards and completed the assembly, adding through the hole components and testing the boards. Read the full update.
Board Manufacturing Order Placed!
We are happy to report that we have completed the transfer of funds from the crowdfunding campaign to our bank account, and immediately used it to place the manufacturing and assembly order for the boards! Read the full update.

Production and Shipment Dates
We are moving forward with various production orders! We have received our order of custom-made XT30-XT60 connectors from Alibaba, and tested them - they are very well made. Due to various delays, it is becoming clear that won't be able to ship the boards on Dec 11, as previously planned. After looking at various options, our new plan is to ship everything after Christmas season, in January 2021. Read the full update.
Crowdfunding Campaign Ends!
Our crowdfunding campaign has been completed successfully! We'd like to thank all our supporters! Read the full update.
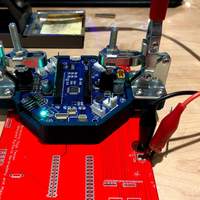
Production Updates and RoverWing Romi Robot Kit
Thank you to all of our backers who have supported us throughout this process. In order to guarantee that all RoverWings that are delivered are all perfectly functioning, we have been working on designing an automatic testing jig in order to perform quick quality control checks on every RoverWing that we deliver. We have also decided to release the parts list as well as an instructional tutorial on how to build a RoverWing Romi Robot kit. Read the full update.

We are Funded - Production Begins!
We are happy to announce that our campaign has been successfully funded! Thanks to all our supporters! Now that we are certain of our financing, we have started working on actual production. Read the full update.

Video demos: PID, IMU, and course correction
The campaign got some new pledges, and we are now in much better shape to meet our funding goal! We're also extending the campaign end date. For today’s update, we wanted to discuss in depth one of the most important features of RoverWing: course correction using IMU. We also have some demo videos to share, including one from our participation in Adafruit's SHOW and TELL! Read the full update.

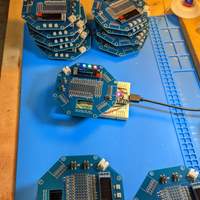
Programming Jig and Video Tutorials
As we made prototype after prototype of the RoverWing board, we quickly realized that one of the biggest challenges during the process of delivering the RoverWings would be the process of flashing the firmware to all of the PCBs as well as verifying that none of the PCBs are defective. This update talks about how we built and designed our testing jig for the RoverWing PCB. Read the full update.
Ask Me Anything on Discord!
Do you have any questions about RoverWing? Want to share a story of your arduino-controlled robots, make suggestions, or just chat with fellow robot enthusiasts? Then join us on Crowd Supply discord server this Wednesday, September 30, at 2pm PST (5pm EST). Read the full update.

Controlling RoverWing via Bluetooth
We got more backers and are now 24% funded - thank you to all who are supporting us! Now onto the subject of today's update - controlling RoverWing via Bluetooth. (Video demo included!) Read the full update.
Powered by Microchip SAM D21 microcontroller
The RoverWing utilizes the 32-bit Microchip SAM D21 Arm® Cortex®-M0+ microcontroller as its heart. This powerful 48 Mhz microcontroller, boasting 256Kb flash memory, numerous I2C, SPI, and UART interfaces and other peripherals can handle complex computations in parallel, reducing the computation load on the host. Read the full update.
Campaign is Live!
The day you have all been waiting for is finally here! The RoverWing campaign is finally launching on the Crowd Supply platform, after weeks of hard work and preparations to ensure that everyone who wants one gets a RoverWing as soon as possible. Read the full update.